- Typ
- Instrukcja obsługi
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...

112
Spis: pag.
1 Ostrzeżenia 113
2 Opis produktu i jego przeznaczenie 113
2.1 Ograniczenia w użytkowaniu 113
2.2 Typowe urządzenie 114
2.3 Wykaz przewodów 114
3 Instalacja 114
3.1 Kontrola wstępna 115
3.2 Mocowanie siłownika 115
3.3 Instalowanie innych urządzeń 116
3.4 Podłączenia elektryczne 116
3.5 Opis połączeń elektrycznych 117
4 Końcowe kontrole przed uruchomieniem 117
4.1 Wybór kierunku 117
4.2 Podłączenie zasilania 118
4.3 Przystosowanie urządzeń 118
4.4 Przyswojenie długości skrzydła 118
4.5 Kontrola ruchu bramy 118
4.6 Funkcje wcześniej ustawione 118
4.7 Zapamiętanie nadajników radiowych 119
4.7.1 Zapamiętanie w Trybie I 119
4.7.2 Zapamiętanie w Trybie II 119
4.7.3 Zapamiętanie “na odległość” 120
4.7.4 Usunięcie z pamięci nadajników radiowych 120
4.7.5 Świadectwo zgodności odbiornika radiowego 120
5 Odbiór i przekazanie do pracy 120
5.1 Odbiór 121
5.2 Przekazanie do pracy 121
6 Konserwacja i likwidacja 121
6.1 Konserwacja 121
6.2 Likwidacja 121
7 Rozszerzenie wiadomości 122
7.1 Przyciski do programowania 122
7.2 Programowanie 122
7.2.1 Funkcje pierwszego poziomu (funkcje ON-OFF) 122
7.2.2 Programowanie pierwszego poziomu
(funkcje ON-OFF) 123
7.2.3 Funkcje drugiego poziomu
(parametry programowane) 123
7.2.4 Programowanie poziom drugi
(parametry regulowane) 124
7.2.5 Przykład programowania pierwszego poziomu
(funkcje ON-OFF) 124
7.2.6 Przykład programowania na drugim poziomie
(parametry regulowane) 125
7.3 Dodawanie lub demontaż urządzeń 125
7.3.1 BlueBUS 125
7.3.2 Wejście STOP 125
7.3.3 Fotokomórki 126
7.3.4 Przyswajanie urządzeń 126
7.4 Funkcje szczególne 126
7.4.1 Funkcja “Zawsze otwórz” 126
7.4.2 Funkcja “Rusz w każdym przypadku” 126
7.5 Podłączenie innych urządzeń 127
7.6 Rozwiązywanie problemów 127
7.7 Diagnostyka i sygnalizacja 127
7.7.1 Sygnalizacje z migaczem 128
7.7.2 Sygnalizacja na centrali 128
7.8 Wyposażenie dodatkowe 129
8 Charakterystyki techniczne 130
Instrukcje i ostrzeżenia przeznaczone dla użytkownika
siłownika ROBUS 131
Robus350

PL
113
2.1) Ograniczenia w użytkowaniu
Dane dotyczące wydajności ROBUS350 są podane w rozdziale “8
Charakterystyki techniczne” i są jedynymi wartościami jakie pozwalają
na właściwą ocenę możliwości użycia.
Ogólnie, ROBUS350 jest w stanie zautomatyzować bramy o wadze do
350Kg, lub o długści do 15m, tak jak to podano w tabelach N 1 i N 2.
Długość skrzydła pozwala na określenie maksymalnej ilości cyklów na
godzinę, oraz na ilość cykli kolejnych, natomiast ciężar pozwala na
określenie procentowe redukcji cykli i maksymalną dozwoloną
prędkość; na przykład jeśli skrzydło ma 5m długości byłyby możliwe 10
cykli/godzinę i 6 cykli kolejnych, natomiast dozwolona prędkość
maksymalna wynosi V5: bardzo szybko.
W celu zapobiegnięciu przegrzaniu, w centrali zamontowany jest
ogranicznik, które oblicza obciążenie silnika i czas trawania cyklów, i
interweniuje, kiedy zostaje przekroczona maksymalna wartość
graniczna
Długość skrzydła maksymalna ilość maksymalna ilość
w metrach cykli/godzinę kolejnych cykli
Do 3 30 20
3÷5 18 12
5÷6 15 10
6÷7 12 8
ROBUS350 jest siłownikiem elektromechanicznym do
automatycznego uruchamiania bram przesuwanych, używanych w
budownictwie mieszkalnym, dysponuje kontrolującą centralą
elektroniczną i odbiornikiem do sterowania radiowego. Podłączenia
elektryczne do urządzeń zewnętrznych są uproszczone dzięki użyciu
“BlueBUS”, co pozwala na podłączenie więcej niż jednego urządzenia
za pomocą jedynie 2 przewodów. ROBUS350 działa przy pomocy
energii elektrycznej, a w przypadku braku napięcia w sieci elektrycznej,
można wysprzęglić za pomocą odpowiedniego klucza i przesunąć
ręcznie bramę; albo też używając opcjonalne wyposażenie: akumulator
awaryjny PS 124, który pozwala na wykonanie ruchu bez zasilania z
sieci.
2) Opis produktu i jego przeznaczenie
Tabela N 1: ograniczenia wynikające z długości skrzydła.
Ciężar skrzydła Procentowa Dozwolona prędkość
w Kg. ilość cykli maksymalna
Do 200 100% V6 = Najszybciej
200÷250 90% V5 = Bardzo szybko
250÷300 80% V4 = Szybko
300÷350 70% V3 = Średnio
Tabela N 2: ograniczenia wynikajace z ciężaru skrzydła
1
330 195
85
277
1) Ostrzeżenia
Ta instrukcja zawiera ważne informacje dotyczące bezpieczeństwa
podczas instalowania, należy się z nią zapoznać przed rozpoczęciem prac
instalacyjnych. Niniejsza instrukcję należy przechowywać w celu
ewentualnej, przyszłej konsultacji.
Biorąc pod uwagę niebezpieczeństwa, jakie mogą wystąpić podczas
instalowania i użytkowania ROBUS350, dla zwiększenia bezpieczeństwa,
instalacja musi odpowiadać przepisom, normom i uregulowaniom
prawnym. W tym rozdziale są przywołane wszystkie ostrzeżenia ogólne,
inne, ważne ostrzeżenia są podane w rozdziałach “3.1 Kontrola wstępna”;
“5 Odbiór i uruchomienie do pracy”.
Według obowiązujących przepisów europejskich, wykonanie
drzwi lub bramy automatycznej musi być zgodne z Dyrektywą
98/37/CE (Dyrektywa Maszyn), a w szczególności musi
odpowiadać normom: EN 12445; EN 12453 i EN 12635, które
pozwalają na uzyskanie świadectwa zgodności.
Dodatkowe informacje, wytyczne do analiz zagrożeń i Książka Techniczna,
są dostępne na: www.niceforyou.com.
• Niniejsza instrukcja jest przeznaczona wyłącznie dla wykwalifikowanego
personelu instalujacego. Poza załączoną specyfikacją do oderwania dla
instalatora, “Instrukcje i ostrzeżenia przeznaczone dla użytkownika
siłownika ROBUS”, żadna inna informacja zawarta w niniejszej broszurze
nie jest potrzebna dla ostatecznego użytkownika!
• Użycie ROBUS350 do innych celów niż przewidziano w niniejszej
instrukcji jest zabronione; użycie niezgodne z przeznaczeniem może być
powodem niebezpieczeństwa lub wyrządzić szkody ludziom albo
rzeczom.
• Przed rozpoczęciem instalowania należy wykonać analizę zagrożeń z
wykazem podstawowych warunków bezpieczeństwa, przewidzianych w
załączniku I Dyrektywy Maszyn, wskazując odpowiednie rozwiązania jakie
należy zastosować. Przypomina się, że analiza zagrożeń jest jednym z
dokumentóskładowych “książki technicznej” automatyzacji.
• Należy sprawdzić konieczność zastosowania dodatkowych urządzeń w
celu skompletowania automatyzacji z ROBUS350 na podstawie
istniejących warunków użytkowania i innych, występujących zagrożeń;
muszą, na przykład, być wzięte pod uwagę zagrożenia wynikające z
uderzenia, zgniecenia, wciągnięcia itp., i inne ogólne zagrożenia.
• Nie wykonywać żadnych zmian na żadnej z części, jeśli nie są
przewidziane w niniejszej instrukcji; operacje tego rodzaju mogą jedynie
spowodować niewłaściwe działanie; NICE nie bierze odpowiedzialności
za szkody powstałe na zmodyfikowanym produkcie.
• Podczas instalowania i użytkowania, należy uważać, aby do wnętrza
centrali i innych urządzeń otwartych nie dostały się elementy stałe lub
płyny; ewentualnie należy zwrócić się do serwisu technicznego NICE;
użytkowanie ROBUS350 w takich sytuacjach może spowodować
niebezpieczeństwo.
• Automat nie może być użytkowany znim nie zostanie dopuszczony do
pracy, zgodnie z rozdziałem: “5 Odbiór i dopuszczenie do pracy”.
• Opakowanie ROBUS350 musi być zlikwidowane zgodnie z miejscowymi
przepisami.
• Po zadziałaniu wyłączników automatycznych lub bezpieczników i przed ich
przywróceniem do pierwotnej postaci, należy określić i wyeliminować usterkę.
• Przed otwarciem pokrywy ROBUS350 z zaciskami, należy odłączyć
wszystkie obwody zasilające; jeśli urządzenie wyłączające jest
niewidoczne z miejsca pracy, należy zawiesić tablice “UWAGA - PRACE
W TOKU”.
!

114
2.2) Typowe urządzenie
Na rys. 2 jest pokazane typowe urządzenie automatyzujące bramę przesuwną przy wykorzystaniu ROBUS350.
2
1 Przełącznik na klucz
2 Fotokomórki na kolumience
3 Fotokomórki
4 Bok główny stały (opcja)
5 Bok główny ruchomy
6 Wspornik wyłącznika krańcowego “Otwarte”
7 Zębatka
8 Bok wtórny stały (opcja)
9 Światło migające z wbudowaną anteną
10 ROBUS350
11 Wspornik wyłącznika krańcowego “Zamknięte”
12 Bok wtórny ruchomy (opcja)
13 Radionadajnik
2.3) Wykaz przewodów
W typowym urządzeniu pokazanym na rysunku 1 są uwidocznione także przewody niezbędne do podłączenia różnych urządzeń; w tabeli nr3 są
podane charakterystyki przewodów.
Użyte przewody muszą być zgodne z rodzajem instalacji; na przykład zaleca się przewód H03VV-F do wnętrz albo H07RN-F na
zewnątrz.
!
Uwaga 1: Jeśli przewód zasilający jest dłuższy niż 30m, to należy zastosować przewód o większym przekroju, na przykład 3x2,5mm
2
, oraz
niezbędne jest uziemienie w pobliżu automatyki.
Uwaga 2: jeśli przewód “BLUEBUS” jest dłuższy niż 30m, ale nie dłuższy niż 50m, to należy zastosować przewód 2x1mm
2
.
Uwaga 3: dwa przewody 2x0,5mm
2
mogą być zastąpione jednym przewodem 4x0,5mm
2
.
Uwaga 4: jeśli istnieje więcej niż jeden bok, patrz rozdział “7.3.2 Wejście STOP” dla zalecanego rodzaju połączenia
Uwaga 5: do połączenia brzegów ruchomych na skrzydłach przesuwnych należy wykorzystać odpowiednie urządzenia, które pozwalają na
połączenie również wtedy, kiedy skrzydło jest w ruchu.
Podłączenie Rodzaj przewodu Maksymalna dozwolona długość
A: Linia elektryczna zasilająca N 1 przewód 3x1,5mm
2
30m (uwaga 1)
B: Światło migające z anteną
N 1 przewód 2x0,5mm
2
20m
N 1 przewód ekranowany RG58 20m (zaleca się krótszy niż 5m)
C: Fotokomórki N 1 przewód 2x0,5mm
2
30m (uwaga 2)
D: Przełącznik na klucz N 2 przewody 2x0,5mm
2
(uwaga 3) 50m
E: Boki stałe przewód 2x0,5mm
2
(uwaga 4) 30m
F: Brzegi ruchome przewód 2x0,5mm
2
(uwaga 4) 30m (uwaga 5)
Tabela N 3: wykaz przewodów
Instalacja ROBUS350 musi być wykonana przez wykwalifikowany personel, zgodnie z przepisami, normami i
uregulowaniami prawnymi, oraz według niniejszej instrukcji.
!
3) Instalacja
2
43 38
10
2
6
11
7
9
13
1251
E
F
D
C F
A
B

PL
115
3.2) Mocowanie siłownika
Jeśli powierzchnia podparcia już istnieje mocowanie siłownika należy
wykonać bezpośrednio na tej powierzchni, wykorzystując do tego celu
odpowiednie środki jak na przykład kołki rozporowe. W przeciwnym
przypadku, w celu zamocowania siłownika należy:
1. Wykonać wykop pod fundament o odpowiednich wymiarach
wykorzystując jako odniesienie wartości podane na rys.3.
2. Przygotować jedną lub więcej rur do przeprowadzenia przewodów,
tak jak na rys. 4.
3. Złączyć dwie śruby fundamentowe do płyty fundamentowej,
wkładając jedną nakrętkę pod a drugą nad płytę; nakrętkę dolną
należy dokręcić do końca gwintu w taki sposób, aby część
nagwintowana wystawała około 25÷35mm nad płytą.
4. Wylać beton, i zanim zacznie tężeć, ustawić płytę fundamentową
według wartości podanych na rys. 4; sprawdzić czy jest równoległa
do skrzydła i dokładnie wypoziomowana. Odczekać do całkowitego
stężenia betonu.
5. Odkręcić dwie górne nakrętki z płyty, następnie ustawić na niej
siłownik, sprawdzić czy jest dokładnie równoległy do skrzydła i
następnie lekko dokręcić 2 nakrętki i podkładki, jakie są na
wyposażeniu, tak jak na rys. 7.
3.1) Kontrola wstępna
Przed przystąpieniem do instalacji ROBUS350, należy przeprowadzić
następujące kontrole:
• Sprawdzić, czy cały materiał jaki ma być zastosowany jest w
idealnym stanie, odpowiedni do użycia i zgodny z normami.
• Sprawdzić, czy brama nadaje się do automatyzacji.
• Sprawdzić, czy ciężar i wymiary skrzydła mieszczą się w granicach
podanych w rozdziale “2.1. Wartości graniczne zastosowania”.
• Sprawdzić, porównując z wartościami podanymi w rozdziale “8
Charakterystyki techniczne”, czy tarcie statyczne, (to znaczy siła
niezbędna do poruszenia skrzydła) jest mniejsza od połowy “Siły
maksymalnej”, i czy tarcie dynamiczne (to znaczy siła potrzebna do
utrzymania ruchu skrzydła) jest mniejsza od połowy “Siły nominalnej”;
zaleca się margines 50% jeśli chodzi o siły, ponieważ warunki
klimatyczne mogą zwiększyć tarcie.
• Sprawdzić, czy na całej drodze przesuwu skrzydła, tak przy
zamykaniu jak i przy otwieraniu niema miejsc gdzie występuje
zwiększony opór.
• Sprawdzić, czy niema niebezpieczeństwa wykolejenia się skrzydła i
czy nie występuje zagrożenie wysunięcia się z prowadnic.
• Sprawdzić wytrzymałość ograniczników mechanicznych wybiegów,
sprawdzając czy niema odkształceń również jeśli skrzydło miałoby
uderzyć silnie w zderzak
• Sprawdzić, czy skrzydło pozostaje w równowadze, to znaczy nie może
się ruszać jeśli jest pozostawione zatrzymane w jakiejkolwiek pozycji.
•
Sprawdzić strefę mocowania siłownika, czy nie jest zalewana i,
ewentualnie, zamontować siłownik na odpowiednim wsporniku nad
ziemią.
• Sprawdzić, czy strefa mocowania siłownika pozwala na jego
wysprzęglenie oraz bezpieczny i pewny przesuw ręczny.
• Sprawdzić, czy punkty mocowania różnych urządzeń są w
miejscach zabezpieczonych przed uderzeniami i czy ich
powierzchnie są odpowiednio solidne.
• Unikać, aby elementy automatyki zostały zanurzone w wodzie lub w
innych cieczach.
• Nie ustawiać ROBUS350 w pobliżu płomieni lub źródeł ciepła; w
środowisku potencjalnie wybuchowym, szczególnie kwaśnym lub
słonym; ponieważ może ono być powodem nieprawidłowego
działania albo spowodować niebezpieczne zagrożenie.
• W przypadku istnienia przejścia wewnątrz skrzydła lub przejścia w
obszarze ruchu skrzydła, należy upewnić się, że nie utrudnia ono
normalnego przesuwu i ewentualnie przewidzieć odpowiedni system
blokujący.
• Podłączyć centralę do elektrycznej linii zasilającej wyposażonej w
uziemienie zabezpieczające.
• Elektryczna linia zasilająca musi być odpowiednio zabezpieczona
przez właściwe urządzenie magnetyczno-termiczne i różnicowe.
• Na linii zasilającej z sieci elektrycznej należy zamontować urządzenie
rozłączające zasilanie (z kategorią przepięcia III to znaczy odległość
między stykami musi wynosić przynajmniej 3,5mm) albo inne,
równorzędne urządzenie, na przykład wtyczkę i gniazdko. Jeśli
urządzenie rozłączające nie znajduje się w pobliży automatu, to
należy zabudować system blokady przed przypadkowym lub
nieuprawnionym włączeniem.
3
4
5
6
192
330 0÷50
0÷50 330
192
0÷10
0÷10
25÷35
7

116
3.3) Instalowanie innych urządzeń
Wykonać instalację innych, przewidzianych urządzeń, przestrzegając odpowiednich instrukcji. Sprawdzić w paragrafie “3.5 Opis połączeń
elektrycznych” i na rys. 1 urządzenia jakie mogą być podłączone do ROBUS350.
W celu uniknięcia by ciężar skrzydła obciążał siłownik
niezbędne jest, aby pomiędzy zębatką a kołem zębatym był
luz 1÷2mm, tak jak na rys 10.
8.
Przesunąć skrzydło i wykorzystywać zawsze koło zębate jako
punkt odniesienia do zamocowania następnych elementów
zębatki.
9.
Odciąć ostatni, nadmierny odcinek zębatki.
10.
Spróbować poruszać skrzydłem zamykając i otwierając go i
sprawdzić, czy zębatka biegnie wzdłuż koła zębatego, z tolerancją
współosiowości maksymalnie 5mm. Należy także sprawdzić, czy na
całej długości jest luz 1÷2mm pomiędzy zębatką i kołem zębatym.
11.
Energicznie dokręcić nakrętki mocujące siłownik, upewniając się,
że jest właściwie zamocowany do podłoża; Przykryć nakrętki
mocujące odpowiednimi osłonami, tak jak na rys.11.
12.
Zamocować za pomocą odpowiednich śrub wsporniki
wyłączników krańcowych “Otwarcie” i “Zamknięcie” z obydwu
końców zębatki, tak jak na rys. 12. Należy wziąć pod uwagę, że
kiedy zadziałają wyłączniki krańcowe, to skrzydło przesunie się
jeszcze o następne 2÷3cm; zaleca się więc ustawić wsporniki
wyłączników krańcowych z odpowiednim marginesem w
stosunku do zderzaków mechanicznych.
13.
Zablokować siłownik tak jak podano w paragrafie “Odblokowanie
i ruch ręczny” w rozdziale “Instrukcje i ostrzeżenia przeznaczone
dla użytkownika siłownika ROBUS.
!
8 9
10
11 12
Jeśli zębatka już jest, to po zamocowaniu siłownika, należy ustawić
kołki regulacyjne tak jak na rys. 8 i tak, aby ustawić koło zębate
ROBUS350 na odpowiedniej wysokości, pozostawiając na zębatce luz
na około 1÷2mm.
W przeciwnym wypadku, aby zamocować zębatkę należy:
6. Odblokować siłownik w sposób podany w paragrafie
“Wysprzęglanie i ruch ręczny” w rozdziale “Instrukcje i ostrzeżenia
przeznaczone dla użytkownika siłownika ROBUS”.
7. Całkowicie otworzyć skrzydło, oprzeć na kole zębatym pierwszy
odcinek zębatki i sprawdzić czy początek zębatki odpowiada
początkowi skrzydła jak na rys. 9. Sprawdzić czy pomiędzy kołem
zębatym a zębatką jest luz 1÷2mm, następnie odpowiednimi
narzędziami zamocować zębatkę do skrzydła.
1÷2
3.4) Podłączenia elektryczne
Wszystkie podłączenia elektryczne muszą być wykonane
po odcięciu napięcia do urządzenia i z wyłączonym
ewentualnym akumulatorem pomocniczym.
1. Aby zdjąć pokrywę zabezpieczającą i dostać się do centrali
kontrolnej ROBUS350, należy wykręcić śruby z boku i wyjąć
pokrywę wyciągając ja w górę.
2. Wyjąć gumową przelotkę, która zamyka otwór do przełożenia
przewodów i przełożyć wszystkie przewody podłączeń do różnych
urządzeń, pozostawiając je dłuższe o 20÷30cm od wyliczonej
długości. Patrz tabela N 3 dla rodzaju przewodu i rys. 1 dla
podłączeń.
3. Za pomocą opaski zaciskowej związać wszystkie przewody, które
wchodzą do siłownika nieco poniżej otworu do wprowadzenia
przewodów. Na przelotce z gumy wyciąć otwór o średnicy mniejszej
od wiązki przewodów i założyć ją na przewody, doprowadzając aż
do opaski zaciskowej. Założyć drugą opaskę zaciskową ponad
przelotką.
4. Podłączyć przewód zasilający do odpowiedniego zacisku, tak jak
pokazano na rys. 13, następnie, za pomocą opaski zaciskowej
unieruchomić przewód na pierwszym pierścieniu zaciskowym
5. Wykonać podłączenia następnych przewodów zgodnie ze
schematem na rys. 15. Dla ułatwienia zaciski można wyjąc.
6. Po ukończeniu podłączeń, należy zablokować przewody następną
opaską zaciskową na drugim pierścieniu, a nadmiar przewodu
anteny należy zblokować z innymi przewodami za pomocą opaski
zaciskowej tak, jak pokazano na rys. 14.
!

PL
117
3.5) Opis połączeń elektrycznych.
W tym paragrafie znajduje się krótki opis połączeń elektrycznych;
dodatkowe informacje znajdują się w paragrafie “7.3 Dołączenie lub
odłączenie urządzeń”.
FLASH: wyjście do lampy sagn. typu “LUCYB” lub innych z lampką
12V maksymalnie 21W.
S.C.A.: wyjście “Lampka Brama Otwarta”; można podłączyć lampkę
sygnalizacyjną 24V maksymalnie 4W.
BLUEBUS: do tego zacisku można podłączyć kompatybilne
urządzenia; wszystkie są łączone równolegle z jedynie dwoma
przewodami, którymi są zasilane jak i którymi przechodzą sygnały
komunikowania. Inne informacje dotyczące BlueBUS znajdują się w
paragrafie “7.3.1 BlueBUS”.
STOP: wejście dla urządzeń, które blokują i ewentualnie zatrzymują
wykonywany manewr; za pomocą odpowiednich sposobów na
wejściu można podłączyć kontakty w rodzaju “Normalnie Zamknięty”,
“Normalnie Otwarty” lub urządzenia o stałej oporności. Dodatkowe
informacje dotyczące STOP znajdują się w paragrafie “7.3.2 Wejście
STOP”.
P.P.: wejście dla urządzeń, które sterują ruchem; można podłączyć
kontakty typu “Normalnie Otwarty”.
ANTENA: wejście podłączenia anteny dla odbiornika radiowego
(antena jest zabudowana w LUCY B).
13
14
15
Przed rozpoczęciem fazy kontroli i rozruchu automatyzacji zaleca się ustawienie skrzydła w połowie drogi tak, aby mogło się poruszać w kierunku
otwarcia jak i zamknięcia.
4) Końcowe kontrole przed uruchomieniem
4.1) Wybór kierunku
Zgodnie z pozycją siłownika w stosunku do skrzydła niezbędne jest
wybranie kierunku manewru otwarcia; jeśli dla otwarcia skrzydło ma się
przesuwać w lewo, to należy przestawić przełącznik w lewo, tak jak na
rys. 16, jeśli otwarcie skrzydła ma odbywać się w prawo, to należy
przestawić przełącznik w prawo, tak jak na rys. 17.
16
17
LUCYB S.C.A. MOFB MOSE

118
Jak tylko zostanie dostarczone napięcie do ROBUS350, zaleca się
wykonanie niektórych prostych kontroli:
1. Sprawdzić, czy lampka sygnalizacyjna BLUEBUS miga regularnie z
częstotliwością jednego mignięcia na sekundę.
2. Sprawdzić, czy migają również lampki kontrolne na fotokomórkach
(tak na TX jak i na RX); nie jest ważny rodzaj migania ponieważ
uzależniony jest od innych czynników.
3. Sprawdzić, czy lampka migająca podłączona do wyjścia FLASH i
lampka kontrolna podłączona do wyjścia S.C.A. nie palą się.
Jeśli tak się nie dzieje należy natychmiast wyłączyć zasilanie centrali i
sprawdzić uważnie połączenia elektryczne.
Inne informacje, niezbędne do wyszukiwania i diagnozy uszkodzeń są
podane w rozdziale “7.6 Rozwiązywanie problemów”.
4.2) Podłączenie zasilania
Podłączenie zasilania do ROBUS350 musi być wykonane przez fachowy, wykwalifikowany personel, posiadający niezbędne
narzędzia i w pełnym poszanowaniu przepisów, norm i uregulowań prawnych.
!
4.3) Przystosowanie urządzeń
Po podłączeniu zasilania należy spowodować przez centralę
rozpoznawanie urządzeń podłączonych do wejść BLUEBUS i STOP.
Przed tą fazą lampki kontrolne L1 i L2 migają, wskazując, że należy
wykonać rozpoznanie urządzeń.
Faza przyswajania podłączonych urządzeń może być powtórzona w jakimkolwiek momencie, również po
zainstalowaniu dodatkowego urządzenia; w celu wykonania nowego przyswojenia patrz paragraf “7.3.4
Przyswojenie innych urządzeń”.
1. Wcisnąć i trzymać wciśnięte przyciski [▲] i [Set]
2. Zwolnić przyciski kiedy lampka L1 i L2 zaczną bardzo szybko migać (po około 3 sekundach)
3. Odczekać kilka sekund aż centrala skończy rozpoznawanie urządzeń
4. Po zakończeniu rozpoznania lampka STOP musi pozostać zapalona, lampki L1 i L2 zgasną (ewentualnie
zaczną migać lampki L3 i L4)
4.4) Przyswojenie długości skrzydła
Po przyswojeniu urządzeń rozpoczną migotanie lampki L3 i L4; oznacza
to, że centrala musi przyswoić długość skrzydła (odległość od wyłącznika
krańcowego zamknięcia do wyłącznika krańcowego otwarcia);
ten wymiar jest niezbędny do wyliczenia punktów zwalniania i punktu
otwarcia częściowego.
Jeśli tak się nie dzieje, należy natychmiast wyłączyć zasilanie centrali i sprawdzić z większą uwagą połączenia
elektryczne. Inne potrzebne informacje znajdują się w rozdziale “7.6 Rozwiązywanie problemów”.
1. Wcisnąć i trzymać wciśnięte przyciski [▼] i [Set]
2. Zwolnić przyciski kiedy rozpocznie się manewr (po około 3 sekundach)
3. Sprawdzić, czy wykonywanym manewrem jest otwarcie, w przeciwnym przypadku wcisnąć przycisk [Stop]
i sprawdzić z większą uwagą paragraf “4.1 Wybór kierunku”; następnie powtórzyć od punktu 1.
4. Odczekać, aż centrala ukończy manewr otwarcia aż do osiągnięcia wyłącznika krańcowego otwarcia; zaraz
potem rozpoczyna się manewr zamknięcia.
5. Odczekać aż centrala skończy manewr zamykania.
4.5) Kontrola ruchu bramy
Po przyswojeniu długości skrzydła zaleca się wykonanie kilku
manewrów, aby sprawdzić prawidłowy ruch bramy.
1.
Wcisnąć przycisk
[Open],
aby wykonać manewr “Otwarcie”;
sprawdzić, czy otwieranie bramy przebiega bez zmiany prędkości;
jedynie kiedy skrzydło znajduje się w położeniu pomiędzy 70 i 50cm
od wyłącznika krańcowego otwarcia musi zwolnić i zatrzymać się po
zadziałaniu wyłącznika krańcowego, w odległości 2÷3cm od
zderzaka mechanicznego otwarcia.
2.
Wcisnąć przycisk
[Close]
, aby wykonać manewr “Zamknięcie”;
sprawdzić czy zamykanie bramy przebiega bez zmiany prędkości;
jedynie kiedy skrzydło znajduje się w położeniu pomiędzy 70 i 50cm
od wyłącznika krańcowego zamknięcia musi zwolnić i zatrzymać się
po zadziałaniu wyłącznika krańcowego, w odległości 2÷3cm od
zderzaka mechanicznego zamknięcia.
3.
Podczas manewru sprawdzić czy migacz miga w cyklach 0,5
sekundy zapalony i 0,5 sekundy zgaszony. Jeśli jest, sprawdzić
również miganie lampki kontrolnej podłączonej do zacisku SCA:
miganie powolne przy otwieraniu i szybkie przy zamykaniu.
4.
Wykonać różne manewry otwierania i zamykania w celu
wychwycenia ewentualnych usterek montażu i regulacji, lub innych
anomalii na przykład punktów ze zwiększonym tarciem.
5.
Sprawdzić, czy mocowanie siłownika ROBUS350, zębatki i
wsporników wyłączników krańcowych jest pewne, stabilne i
odpowiednio wytrzymałe również podczas silnych przyspieszeń lub
zwolnień ruchu bramy.
4.6) Funkcje wcześniej ustawione
Centrala kontrolna ROBUS350 posiada niektóre funkcje do
zaprogramowania, u producenta te funkcje są ustawione w takiej
konfiguracji, jaka powinna zadowolić większą część automatyzacji; w
każdym razie funkcje mogą być w każdej chwili zmienione dzięki
odpowiedniej procedurze programowania. W tym celu patrz paragraf
“7.2 Programowanie”.
18
19

PL
119
N° 1 Polecenie “PP”
N° 2 Polecenie “Otwarcie przejścia”
N° 3 Polecenie “Otwiera”
N° 4 Polecenie “Zamyka”
Tabela N 5: polecenia do dyspozycji w Trybie II
4.7) Zapamiętanie nadajników radiowych
Do sterowania na odległość ROBUS350, na centrali kontrolnej jest przewidziane złącze SM dla odbiorników radiowych typu SMXI lub SMXIS (patrz
rys. 20); każdy nadajnik radiowy jest rozpoznany przez ten odbiornik za pomocą “kodu” innego od każdego innego nadajnika. Niezbędna jest więc
faza “zapamiętania” poprzez którą ustawia się odbiornik do rozpoznania każdego pojedynczego nadajnika. Zapamiętanie nadajników może być
wykonane według 2 trybów:
Tryb I: według tego trybu funkcja przycisków nadajnika jest stała i
każdemu przyciskowi odpowiada w centrali polecenie podane w tabeli
N 4; wykonuje się jedną fazę dla każdego nadajnika w którym zostają
zapamiętane wszystkie przyciski, podczas tej fazy nie jest istotne, który
przycisk został wciśnięty i zostaje zajęte tylko jedno miejsce w pamięci.
W trybie I, zwykle jeden nadajnik może sterować tylko jedną
automatyzacją.
Tryb II: w tym trybie każdy poszczególny przycisk nadajnika może być
przypisany jednemu z 4 możliwych poleceń centrali podanych w tabeli
N 5; dla każdej fazy zostaje zapamiętany tylko jeden przycisk, a
konkretnie ten, który był wciśnięty podczas fazy zapamiętywania. W
pamięci zostaje zajęte tylko jedno miejsce dla każdego zapamiętanego
przycisku. W trybie II różne przyciski tego samego nadajnika mogą być
użyte, aby przekazać więcej poleceń temu samemu automatowi, albo
aby sterować większą ilością automatów. Na przykład, w tabeli N 6,
jest sterowany jedynie automat “A” a przyciski T3 i T4 są przypisane
temu samemu poleceniu; albo w przykładzie w tabeli 7 gdzie steruje się
3 automatami “A” (przyciski T1 i T2), “B” (przycisk T3) i “C” (przycisk T4).
Ponieważ procedury zapamiętania mają ograniczony czas
do 10 sekund, to należy przedtem przeczytać instrukcje
podane w następnych rozdziałach a następnie je zastosować.
!
Przycisk T1 Polecenie “PP”
Przycisk T2 Polecenie “Otwarcie przejścia”
Przycisk T3 Polecenie “Otwiera”
Przycisk T4 Polecenie “Zamyka”
Tabela N 4: zapamiętanie Tryb I.
Przycisk T1 Polecenie “PP” Automatyzacja A
Przycisk T2 Polecenie “Otwarcie przejścia” Automatyzacja A
Przycisk T3 Polecenie “Otwiera” Automatyzacja A
Przycisk T3 Polecenie “Zamyka” Automatyzacja A
Tabela N 6: 1 przykład zapamiętania w Trybie II
Przycisk T1 Polecenie “Otwiera” Automatyzacja A
Przycisk T2 Polecenie “Zamyka” Automatyzacja A
Przycisk T3 Polecenie “PP” Automatyzacja B
Przycisk T4 Polecenie “PP”
Automatyzacja C
Tabela N 7: 2 przykład zapamiętania w Trybie II
Uwaga: nadajniki jednokanałowe dysponują tylko przyciskiem T1,
nadajniki dwukanałowe posiadają jedynie przyciski T1 i T2.
1. Wcisnąć i trzymać wciśnięty mały przycisk na odbiorniku (przez około 3 sekundy)
3s
2. Zwolnić mały przycisk kiedy zapali się lampka sygnalizacyjna na odbiorniku
3. W ciągu 10 sekund wcisnąć przez co najmniej 2 sekundy jakikolwiek przycisk nadajnika do zapamiętania
2s
4. Jeśli zapamiętanie zostało zakończone sukcesem, to lampka sygnalizacyjna
na odbiorniku wykona 3 mignięcia x3
Jeśli zapamiętanie zostało zakończone sukcesem, to lampka sygnalizacyjna na odbiorniku wykona 3 mignięcia. Jeśli są inne nadajniki do
zapamiętania, należy powtórzyć punkt 3 w ciągu następnych 10 sekund. Faza zapamiętania kończy się, jeśli w ciągu 10 sekund nie są otrzymane
nowe kody.
Tabela N 8: aby zapamiętać nadajnik w trybie I Przykład
4.7.1) Zapamiętanie w Trybie I
1. Wcisnąć mały przycisk odbiornika ilość razy odpowiadającą żądanemu poleceniu według tabeli N 5 1....4
2. Sprawdzić, czy lampka kontrolna odbiornika miga taka ilość razy jak żądane polecenie
1....4
3. W ciągu 10 sekund wcisnąć przez co najmniej 2 sekundy żądany przycisk nadajnika dla zapamiętania
2s
4. Jeśli zapamiętanie zostało zakończone sukcesem, to lampka sygnalizacyjna na
odbiorniku wykona 3 mignięcia. x3
Jeśli są inne nadajniki do zapamiętania dla tego samego polecenia, należy powtórzyć punkt 3 w ciągu następnych 10 sekund. Faza zapamiętania
kończy się, jeśli w ciągu 10 sekund nie są otrzymane nowe kody.
Tabela N 9: aby zapamiętać nadajnik w trybie II Przykład
4.7.2) Zapamiętanie w Trybie II
20

120
1. Wcisnąć co najmniej przez 5 sekund przycisk nowego nadajnika radiowego, następnie przycisk zwolnić
5s
2. Wcisnąć powoli 3 razy przycisk na nadajniku już zapamiętanym.
1s 1s 1s
3. Wcisnąć powoli 1 raz przycisk na nowym nadajniku radiowym.
1s
Teraz nowy nadajnik radiowy zostanie rozpoznany przez odbiornik i przejmie charakterystyki jakie miał nadajnik już zapamiętany. Jeśli są inne
nadajniki do zapamiętania, należy powtórzyć wszystkie kroki dla każdego nowego nadajnika.
Tabela N 10: do zapamiętania nadajnika “na odległość” Przykład
4.7.3) Zapamiętanie “na odległość”
Można zapamiętać nowy nadajnik bez używania bezpośrednio małego
przycisku na odbiorniku; aby przeprowadzić takie działanie należy
posiadać zdalne sterowanie już zapamiętane i działające. Nowy
nadajnik “otrzyma” charakterystyki tego, który został już zapamiętany;
tak więc, jeśli pierwszy nadajnik jest zapamiętany w trybie I to również
nowy zostanie zapamiętany w trybie I i będzie można przycisnąć
jakikolwiek z przycisków nadajników. Jeśli natomiast już działający
nadajnik jest zapamiętany w Trybie II, to również nowy będzie
zapamiętany w trybie II i istotnym jest wcisnąć w pierwszym nadajniku
przycisk dotyczący żądanego polecenia a w drugim nadajniku przycisk
mający być przypisany temu poleceniu.
Zapamiętanie na odległość może mieć miejsce we
wszystkich odbiornikach jakie znajdują się w promieniu
zasięgu nadajnika; należy więc doprowadzić zasilanie jedynie
do tego jaki chcemy ustawić.
!
1. Wcisnąć i trzymać wciśnięty mały przycisk na odbiorniku.
2. Poczekać aż zaświeci się lampka kontrolna, potem odczekać aż zgaśnie,
a następnie odczekać aż mignie 3 razy x3
3. Zwolnić przycisk dokładnie podczas 3 mignięcia
4. Jeśli procedura została prawidłowo zakończona, po chwili lampka kontrolna mignie 5 razy.
x5
Tabela N 11: aby usunąć z pamięci wszystkie nadajniki Przykład
4.7.4) Usunięcie z pamięci nadajników radiowych
Świadectwo zgodnośc
N°: 151/SMXI Uakt 03
Nice S.p.a., Via Pezza Alta 13, 31046 Rustigne´ di Oderzo (TV) Italia
NICE S.p.a. oświadcza, że odbiorniki radiowe – modele SMXI, SMXIS i odpowiednio nadajniki FLO2R-S e SM2 są zgodne z podstawowymi
warunkami podanymi w Dyrektywie R&TTE 1999/5/CE, do użytku dla którego aparaty te zostały przeznaczone. Wykonano w Klasie 1, Pod-klasa 20
Data: 19 Marzec 2004 Zarządca Pełnomocny
Lauro Buoro
4.7.5) Świadectwo zgodności odbiornika radiowego
Jest to najważniejsza faza wykonania automatyzacji, która ma na celu
zapewnienie maksymalnego bezpieczeństwa. Odbiór może stanowić
również okresową kontrolę urządzeń, które składają się na
automatyzację.
Odbiór całego urządzenia musi być przeprowadzony przez
doświadczony i wykwalifikowany personel, który musi
wykonać obowiązujące próby, zgodnie z istniejącymi
zagrożeniami i z pełnym przestrzeganiem tego co przewiduje
prawo, normatywy i uregulowania, a w szczególności zgodnie
z wszystkimi warunkami normy EN 12445, która ustala
metody prób do kontroli automatyzacji dla bram.
!
5) Odbiór i przekazanie do pracy
Z dwoma nadajnikami ustawić się w promieniu działania automatyki i wykonać następujące kroki:

PL
121
5.1) Próby odbiorcze
Każdy element automatyki, na przykład listwy, fotokomórki, obwód
zatrzymania awaryjnego itp., wymagają specyficznej fazy odbioru; dla
tych urządzeń będzie trzeba wykonać procedury podane w
odpowiednich dla nich instrukcjach.
Podczas wykonywania prób odbiorczych siłownika ROBUS350 należy
wykonać następującą sekwencję czynności:
1. Sprawdzić, czy były dokładnie przestrzegane wskazówki tego
podręcznika, a w szczególności te z rozdziału „1 Ostrzeżenia”;
2. Odblokować siłownik w sposób podany w paragrafie
“Wysprzęglanie i ruch ręczny” w rozdziale “Instrukcje i ostrzeżenia
przeznaczone dla użytkownika siłownika ROBUS350”.
3. Sprawdzić, czy można ręcznie poruszyć bramę przy zamykaniu i
otwieraniu z siłą nie większą niż 390N (około 40 kg).
4. Blokowanie siłownika
5. Wykorzystując przewidziane urządzenia sterowania lub zatrzymania
(wyłącznik na klucz, przyciski sterowania lub nadajniki radiowe),
wykonać próby otwarcia, zamknięcia i zatrzymania bramy i
sprawdzić czy jej zachowanie odpowiada temu, jak powinna
reagować.
6. Zweryfikować po kolei właściwe funkcjonowanie wszystkich
urządzeń zabezpieczających znajdujących się w instalacji
(fotokomórki, listwy, itd.), a także upewnić się, że brama zachowuje
się zgodnie w sposób przewidywalny. W szczególności, za każdym
razem, kiedy zadziała któreś urządzenie, dioda “BlueBUS”,
znajdująca się na centrali, wykonuje 2 szybkie mignięcia jako
potwierdzenie rozpoznania zdarzenia.
7. Jeśli niebezpieczne sytuacje wywołane ruchem skrzydła zostały
zlikwidowane poprzez zmniejszenie siły uderzenia, należy wykonać
pomiar siły według tego, co przewidziano w normie EN 12445. Jeśli
regulacja “Prędkość” i kontrola “Siły silnika” są użyte jako pomoc w
systemie zmniejszenia siły uderzenia, należy próbować i znaleźć
taką regulację, która da najlepszy wynik.
5.2) Przekazanie do pracy
Przekazanie do pracy może nastąpić tylko po wykonaniu z wynikiem
pozytywnym wszystkich faz odbioru ROBUS350 oraz innych
zabudowanych urządzeń. Zabronione jest częściowe przekazanie do
pracy w sytuacjach “prowizorycznych.
1. Przez co najmniej 10 lat trzeba przechowywać dokumentacje
techniczną automatyzacji, która powinna zawierać: rysunek
złożeniowy automatyzacji, schemat połączeń elektrycznych, analizę
zagrożeń wraz z odpowiednimi, zastosowanymi rozwiązaniami,
świadectwo zgodności producenta wszystkich użytych urządzeń
(dla ROBUS350 użyć załączonego Świadectwa zgodności CE);
kopie instrukcji użytkowania i harmonogram konserwacji
automatyzacji.
2. Na bramie należy zamocować tabliczkę zawierającą przynajmniej
następujące dane: rodzaj automatyzacji, nazwę i adres producenta
(osoby odpowiedzialnej za dopuszczenie do użytkowania), numer
urządzenia, rok produkcji i oznaczenie “CE”.
3. Zamocować w pewny sposób na końcu bramy etykietkę lub
tabliczkę z opisem operacji do odblokowania i przesuwania
ręcznego.
4. Opracować i przekazać właścicielowi świadectwo zgodności
automatyzacji.
5. Opracować i przekazać właścicielowi podręcznik z “Instrukcją i
ostrzeżeniami do używania automatyzacji”.
6. Opracować i przekazać właścicielowi harmonogram konserwacji
automatyzacji (która musi zawierać wszystkie przepisy dotyczące
konserwacji pojedynczych urządzeń).
7. Przed przekazaniem do pracy automatyzacji poinformować w
odpowiedni sposób na piśmie właściciela (na przykład na
podręczniku z instrukcjami i ostrzeżeniami do używania
automatyzacji) o niebezpieczeństwach i zagrożeniach jeszcze
występujących.
W tym rozdziale są podane informacje niezbędne do wykonania planu (harmonogramu) konserwacji i likwidacji ROBUS350.
6) Konserwacja i likwidacja
6.1) Konserwacja
W celu utrzymania stałego poziomu bezpieczeństwa i zapewnienia
maksymalnego czasu użytkowania całej automatyzacji niezbędna jest
regularna konserwacja.
Czynności konserwacyjne należy wykonywać
przestrzegając normy bezpieczeństwa zamieszczone w
niniejszej instrukcji i zgodnie z przepisami prawnymi i
normami aktualnie obowiązującymi
Dla innych urządzeń, innych niż ROBUS350 należy przestrzegać
odpowiednich harmonogramów konserwacji.
1. Dla ROBUS350 niezbędna jest konserwacja zaplanowana co 6
miesięcy lub co 10.000 manewrów od poprzedniej konserwacji:
2. Odłączyć jakiekolwiek źródło zasilania elektrycznego, łącznie z
ewentualnym dodatkowym akumulatorem
3. Sprawdzić stan zużycia wszystkich materiałów, które składają się na
automatyzację ze szczególnym uwzględnieniem zjawiska korozji lub
oksydacji elementów strukturalnych; wymienić elementy, które nie
gwarantują odpowiedniego działania.
4. Sprawdzić stan zużycia elementów ruchomych: koła zębatego,
zębatki i wszystkich elementów skrzydła, wymienić części zużyte.
5. Ponownie podłączyć zasilanie elektryczne i wykonać wszystkie
próby i kontrole przewidziane w paragrafie “5.1 Odbiór”.
!
6.2) Likwidacja
ROBUS jest wykonany z różnego rodzaju materiałów, niektóre z nich
mogą być odzyskiwane; stal, aluminium, tworzywa sztuczne, przewody
elektryczne; inne muszą być zlikwidowane: baterie i obwody
elektroniczne.
Niektóre elementy mogą zawierać substancje trujące, nie
wolno ich porzucać w przypadkowych miejscach.
Zapoznajcie się ze sposobami recyklingu i dostosowujcie się
do aktualnie obowiązujących w tym zakresie norm
1. Odłączyć źródło zasilania elektrycznego, łącznie z ewentualnym
dodatkowym akumulatorem.
2. Zdemontować wszystkie urządzenia i akcesoria w kolejności
odwrotnej do podanej w rozdziale „3 Instalowanie”
3. Oddzielić, o ile to możliwe, części, które mogą być poddane
recyklingowi lub likwidacji w inny sposób, na przykład elementy
metalowe od elementów z tworzyw sztucznych, obwody
elektroniczne, baterie itp.
4. Rozdzielić i przekazać różne materiały tak oddzielone do central
zajmujących się odzyskiwaniem materiałów wtórnych jakie
występują na poziomie lokalnym.
!

122
Led Funkcja Opis
L1 ZamkniÍcie Ta funkcja pozwala na automatyczne zamknięcie bramy po zaprogramowanym czasie przerwy, fabryczny
automatyczne Czas Przerwy jest ustawiony na 30 sekund, ale może być zmieniony na 5, 15, 30, 45, 60 i 80 sekund. Jeśli
funkcja nie jest uaktywniona, to działanie jest “pół-automatyczne”.
L2 Zamknij po Foto Ta funkcja pozwala na utrzymywaniu bramy otwartej przez czas niezbędny do przejścia przez nią, bowiem
zawsze działanie fotokomórki „Foto” wywołuje automatyczne zamknięcie z czasem zwłoki 5 sekund
(niezależnie od zaprogramowanej wartości). Sytuacja ta zmienia się w zależności od tego, czy jest aktywna,
lub nie, funkcja „Automatycznego Zamknięcia”.
Przy “Zamknięciu Automatycznym” nieaktywnym: Brama osiąga zawsze położenia całkowitego
otwarcia (także jeśli zadziałanie fotokomórki ma miejsce wcześniej). Po wyłączeniu fotokomórki wywołuje się
zamknięcie automatyczne ze zwłoką 5 sekundową.
Przy “Zamknięciu Automatycznym” aktywnym: czynność zamykania następuje niezwłocznie po
zwolnieniu linii Foto i wywoływane jest automatyczne zamknięcie ze zwłoką 5 sekundową.
Funkcja “Zamknij po Foto” jest zawsze wyłączana podczas manewrów przerwanych poleceniem Stop.
Jeśli funkcja “Zamknij po Foto” nie jest aktywna, czas zwłoki będzie taki jak zaprogramowany, albo nie
nastąpi automatyczne zamknięcie, jeśli funkcja nie jest aktywna.
L3 Zawsze Zamyka „Zawsze Zamyka” działa, powodując zamknięcie, kiedy po przywróceniu zasilania zostaje wykryta otwarta
Funkcja brama. Ze względów bezpieczeństwa manewr poprzedza 5 sekund migania. Jeśli funkcja nie jest włączona,
to po przywróceniu zasilania brama nie zamknie się.
L4 Stand-By Ta funkcja pozwala na maksymalne zmniejszenie zużycia energii, jest szczególnie przydatna jeśli działa z
dodatkowym akumulatorem. Jeśli ta funkcja jest włączona, to po 1 minucie od ukończenia manewru,
centrala wyłączy wyjście BLUEBUS (a więc i urządzenia) i wszystkie lampki kontrolne, za wyjątkiem lampek
kontrolnych BLUEBUS, które będą powoli migać. Jeśli funkcja nie jest włączona to nie będzie zmniejszenia
zużycia energii.
L5 Ruszenie Włączając tą funkcję, zostaje wyłączone stopniowe przyspieszenie podczas rozpoczęcia każdego manewru;
pozwala na uzyskanie maksymalnej siły przy ruszeniu i jest wskazane tam, gdzie są duże statyczne siły tarcia,
na przykład w przypadku śniegu lub lodu, który blokuje skrzydło. Jeśli ta funkcja nie jest włączona, to
manewr rozpoczyna się ze stopniowym przyspieszeniem.
L6 Wstępne migotanie Za pomocą funkcji wstępnego migotania zostaje dodana 3-sekundowa przerwa między włączeniem
migotania i rozpoczęciem manewru w celu wcześniejszego powiadomienia o niebezpiecznej sytuacji. Jeśli
wstępne migotanie nie jest włączone, to włączenie migania jest zrównane z rozpoczęciem manewru.
Podczas normalnej pracy ROBUS350 lampki kontrolne L1 .L6 są zapalone lub zgaszone zgodnie ze stanem funkcji jaką przedstawiają, na
przykład L1 pali się jeśli jest włączone „Zamykanie Automatyczne”.
W tym rozdziale są podane możliwości programowania, personalizacji, diagnostyki i odszukiwania usterek w ROBUS350.
7) Rozszerzenie wiadomości
Open Przycisk “OPEN” pozwala na sterowanie otwarciem bramy
▲ albo do przesunięcia w górę punkt programowania
Stop Przycisk “STOP” pozwala na zatrzymanie manewru, jeśli pozostanie
Set wciśnięty przez dłużej niż 5 sekund pozwala na wejście w programowanie.
Close Przycisk “CLOSE “ pozwala na sterowanie zamknięciem bramy
▼ lub przesunięciem w dół punkt programowania.
7.1) Przyciski do programowania
Na centrali kontrolnej ROBUS350 znajdują się 3 przyciski, które mogą
być użyte tak do sterowania centrali podczas prób jak i do
programowania:
7.2) Programowanie
Na centrali kontroli ROBUS350 są do dyspozycji niektóre funkcje jakie
można programować; regulacja funkcji następuje za pomocą 3
przycisków znajdujących się na centrali: [▲] [Set] [▼] i są
uwidocznione za pomocą 6 lampek kontrolnych led: L1...L6.
Funkcje jakie można programować i jakie są do dyspozycji na
ROBUS350 są ustawione na dwóch poziomach:
Poziom pierwszy: funkcje regulowane w trybie ON-OFF (aktywna lub
nieaktywna); w tym przypadku każda lampka led L1...L6 wskazuje
funkcję, jeśli się pali to funkcja jest aktywna, jeśli zgaszona to funkcja
nie jest aktywna; patrz tabela N 12.
Poziom drugi: parametry jakie można regulować na skali wartości
(wartości od 1 do 6); w tym przypadku każda lampka led L1...L6
wskazuje wartość nastawioną pomiędzy 6 możliwościami; patrz tabela
N 14.
Tabela N 12: wykaz programowalnych funkcji: pierwszy poziom
7.2.1) Funkcje pierwszego poziomu (funkcje ON-OFF)
21

PL
123
Czas Przerwa
Funkcja P.P.
Prędkość
silnika
Wyjście
S.C.A.
Siła silnika
Otwiera
częściowo
L1
L2
L3
L4
L5
L6
L1
L2
L3
L4
L5
L6
L1
L2
L3
L4
L5
L6
L1
L2
L3
L4
L5
L6
L1
L2
L3
L4
L5
L6
L1
L2
L3
L4
L5
L6
5 sekund
15 sekund
30 sekund
45 sekund
60 sekund
80 sekund
Otwiera-stop–zamyka- stop
Otwiera - stop – zamyka - otwiera
Otwiera–zamyka-otwiera-zamyk
Wspólne
Zamyka
Obecność człowieka
B. Powoli
Powoli
Średnia
Szybko
Bardzo szybko
Najszybciej
Funkcja S.C.A.
Włączona, jeśli skrzydło zamknięte
Włączona, jeśli skrzydło otwarte
Aktywna z 3 poleceniem radio
Attiva con 4Ą comando radio
Aktywna z 4 poleceniem radio
Brama “bardzo lekka”
Brama “lekka”
Brama “średnia”
Brama “średnio-ciężka”
Brama “ciężka”
Brama “bardzo ciężka”
0,5 m
1 m
1,5 m
2 m
2,5 m
3 m
7.2.2) Programowanie pierwszego poziomu (funkcje ON-OFF)
Fabrycznie funkcje pierwszego poziomu są wszystkie ustawione na „OFF”, ale mogą być zmienione w każdym momencie, tak jak pokazano w
tabeli N 13. Należy uważać przy wykonywaniu tej procedury, ponieważ maksymalny czas wynosi 10 sekund od wciśnięcia jednego przycisku do
wciśnięcia następnego, w przeciwnym razie procedura zostaje zakończona automatycznie zapamiętując zmiany wykonane do tego momentu.
1. Wcisnąć i trzymać wciśnięty przycisk [Set] przez około 3 sekundy
3s
2. Zwolnić przycisk [Set], kiedy lampka kontrolna L1 rozpocznie migać
L1
3. Wcisnąć przyciski [▲] lub [▼] aby zamienić lampkę kontrolną, która migota na lampkę kontrolną, która
przedstawia funkcję jaka ma być zmieniona o
4. Wcisnąć przycisk [Set], aby zmienić stan funkcji (miganie krótkie = OFF; miganie długie = ON)
5. Odczekać 10 sekund, aby wyjść z programowania dla maksymalnego czasu zakończenia.
10s
Uwaga: punkty 3 i 4 mogą być powtórzone podczas tej samej fazy programowania w celu wprowadzenia ON lub OFF dla innych funkcji
Tabela N 13: aby zmienić funkcję ON-OFF Przykład
SET
SET
SET
7.2.3) Funkcje drugiego poziomu (parametry programowane)
Tabela N 14: wykaz funkcji programowanych: poziom drugi
Lampka wejścia Parametr Lampka (poziom) wartość Opis
Reguluje czas przerwy, to znaczy czas przed
powtórnym zamknięciem automatycznym.
Działa jedynie jeśli zamykanie automatyczne
jest włączone.
Reguluje kolejność poleceń związanych z
wejściem P.P albo przy 1 poleceniu
radiowym (patrz tabele 4 i 5)
Reguluje prędkość silnika podczas biegu
normalnego.
Reguluje funkcje związane z wyjściem S.C.A.
Reguluje system kontroli siły silnika, aby
dostosować ją do ciężaru bramy
Reguluje wymiar częściowego otwarcia.
Otwarcie częściowe można sterować tylko 2
poleceniem radio (patrz tabele 4 i 5)
Uwaga: “ “ przedstawia ustawienie fabryczne
L1
L2
L3
L4
L5
L6

124
7.2.4) Programowanie poziom drugi (parametry regulowane)
Fabrycznie parametry regulowane są ustawione tak jak w tabeli z: ” „, ale mogą być zmienione w jakimkolwiek momencie, zgodnie z tym co
podano w tabeli N 15. Należy uważać przy wykonywaniu tej procedury, ponieważ maksymalny czas wynosi 10 sekund od wciśnięcia jednego
przycisku do wciśnięcia następnego, w przeciwnym razie procedura zostaje zakończona automatycznie zapamiętując zmiany wykonane do tego
momentu.
1. Wcisnąć i trzymać wciśnięty przycisk [Set] przez około 3 sekundy
3s
2. Zwolnić przycisk [Set], kiedy lampka kontrolna L1 rozpocznie migać
L1
3. Wcisnąć przyciski [▲] lub [▼] aby zamienić lampkę kontrolną „na wejściu”, która miga i która
przedstawia parametr jaki ma być zmieniony o
4. Wcisnąć i trzymać wciśnięty przycisk [Set], przycisk [Set]musi być wciśnięty pomiędzy krokiem 5 i 6
5. Odczekać około 3 sekundy, następnie zapali się lampka kontrolna przedstawiająca aktualny
poziom parametru do zmiany
6. Wcisnąć przyciski [▲] lub [▼] aby zamienić lampkę kontrolną, która miga na lampkę kontrolną która
przedstawia parametr
o
7. Zwolnić przycisk [Set]
8. Odczekać 10 sekund, aby wyjść z programowania dla maksymalnego czasu zakończenia
10s
Uwaga: punkty od 3 do 7 mogą być powtórzone podczas tej samej fazy programowania w celu regulacji większej ilości parametrów
Tabela N 15: aby zmienić nastawialne parametry Przykład
SET
SET
SET
SET
7.2.5) Przykład programowania pierwszego poziomu (funkcje ON-OFF)
Jako przykład jest przywołana sekwencja operacji, aby zmienić ustawienie fabryczne funkcji, aby włączyć funkcje „Zamykanie Automatyczne” (L1)
i „Zawsze Zamyka” (L3).
1. Wcisnąć i trzymać wciśnięty przycisk [Set] przez około 3 sekundy
3s
2. Zwolnić przycisk [Set], kiedy lampka kontrolna L1 rozpocznie migać
L1
3. Wcisnąć jeden raz przycisk [Set], aby zmienić stan funkcji powiązanej z L1 (Zamknięcie Automatyczne),
teraz lampka kontrolna L1miga długimi mignięciami. L1
4. Wcisnąć 2 razy przycisk [▼] aby przesunąć lampkę migającą na lampkę L3
L3
5. Wcisnąć jeden raz przycisk [Set], aby zmienić stan funkcji powiązanej z L3 (Zawsze Zamyka), teraz
lampka kontrolna L3miga długimi mignięciami.
6. Odczekać 10 sekund, aby wyjść z programowania dla maksymalnego czasu zakończenia.
10s
Po zakończeniu tych operacji lampki L1 i L3 muszą pozostać zapalone i wskazywać że są włączone funkcje „Zamknięcie Automatyczne” i
„Zawsze Zamyka”.
Tabela N 16: przykład programowania na pierwszym poziomie Przykład
SET
SET
SET
SET
Wszystkie parametry mogą być regulowane według woli bez żadnych
ograniczeń; jedynie regulacja „Mocy Silnika” wymaga szczególnej
uwagi:
•Nie zaleca się stosowania dużych wartości mocy w celu
skompensowania faktu że skrzydło ma pewne, anormalne miejsca
tarcia; nadmierna siła może wpłynąć na system bezpieczeństwa lub
zniszczyć skrzydło.
•Jeśli kontrola „mocy silnika” jest stosowana jako pomoc do
zmniejszenia siły uderzenia, to po każdej regulacji należy powtórzyć
pomiar siły, tak jak przewidziano w normie EN 12445.
• Zużycie i warunki atmosferyczne wpływają na ruch bramy, okresowo
należy powtórzyć kontrolę regulacji siły

PL
125
7.2.6) Przykład programowania na drugim poziomie (parametry regulowane)
Jako przykład jest podana sekwencja operacji w celu zmiany ustawienia fabrycznego parametrów i zwiększenie „Czasu Przerwy” do 60 sekund
(wejście na L1 i poziom na L5) i zmniejszenia „Siły Silnika” dla bram lekkich (wejście na L5 i poziom na L2).
1. Wcisnąć i trzymać wciśnięty przycisk [Set] przez około 3 sekundy
3s
2. Zwolnić przycisk [Set], kiedy lampka kontrolna L rozpocznie migać
L1
3. Wcisnąć i trzymać wciśnięty przycisk [Set]; przycisk [Set] musi być wciśnięty podczas wszystkich
kroków 4 i 5.
4. Odczekać około 3 sekundy aż zapali się lampka L3, która przedstawia aktualny poziom
„Czasu Przerwy” L3 3s
5. Wcisnąć 2 razy przycisk [▼] paby przesunąć zapalona lampkę na L5 która przedstawia nową
wartość „czasu Przerwy” L5
6. Zwolnić przycisk [Set]
7. Wcisnąć 4 razy przycisk [▼] aby przesunąć migająca lampkę na L5
L5
8. Wcisnąć 4 razy przycisk [Set]; przycisk [Set] musi być wciśnięty podczas wszystkich kroków 9 i 10.
9. Odczekać około 3 sekundy aż zapali się lampka L5, która przedstawia aktualny poziom „Siły Silnika”
L3 3s
10. Wcisnąć 3 razy przycisk [▲] aby przesunąć zapalona lampkę na L2, która przedstawia nową
wartość „Siły Silnika” L2
11. Zwolnić przycisk [Set]
12. Odczekać 10 sekund, aby wyjść z programowania dla maksymalnego czasu zakończenia.
10s
Tabela N 17: przykład programowania drugiego poziomu Przykład
SET
SET
SET
SET
SET
SET
7.3) Dodawanie lub demontaż urządzeń
Przy automatyzacji z ROBUS350 istnieje możliwość dodawania lub
demontażu urządzeń w jakimkolwiek momencie. W szczególności do
„BLUEBUS” i do wejścia „STOP” mogą być podłączone różne rodzaje
urządzeń, tak jak podano w paragrafach „7.3.1 BlueBUS” i „7.3.2
Wejście „STOP”.
7.3.1) BlueBUS
BlueBUS jest techniką, która pozwala na wykonanie podłączeń
urządzeń kompatybilnych za pomocą jedynie dwóch przewodów,
którymi jest przesyłane zasilanie elektryczne jak i sygnały komunikatów.
Wszystkie urządzenia są podłączane równolegle na tych samych 2
przewodach BlueBUS i bez konieczności przestrzegania
biegunowości; każde urządzenie jest rozpoznawane pojedynczo,
ponieważ podczas instalowania jest mu przypisany jeden,
niepowtarzalny adres. Do BlueBUS można podłączyć na przykład:
fotokomórki, urządzenia bezpieczeństwa, przyciski sterowania, lampki
sygnalizacyjne itp. Centrala kontrolna ROBUS350 rozpoznaje jedno po
drugim wszystkie urządzenia podłączone poprzez odpowiednią fazę
rozpoznania i jest w stanie pewnie wykryć wszelkie anomalie. Z tego
powodu za każdym razem kiedy jest dodawane lub demontowane
jakieś urządzenie podłączone do BlueBUS, należy w centrali
przeprowadzić fazę rozpoznania, tak jak opisano w paragrafie „7.2.4
Rozpoznawanie innych urządzeń”.
7.3.2) Wejście STOP
STOP jest wejściem, które powoduje natychmiastowe zatrzymanie
manewru po czym następuje krótka zmiana kierunku (odjechanie). Do
tego wejścia mogą być podłączone urządzenia z wyjściem na kontakt
normalnie otwarty „NA”, normalnie zamknięty „NC”, albo urządzenia z
wyjściem na opór stały 8,2kΩ, na przykład czujniki brzegów.
Tak jak dla BlueBUS, centrala rozpoznaje rodzaj urządzenia
podłączonego do wejścia STOP podczas fazy rozpoznawania (patrz
paragraf „7.2.4 Rozpoznawanie innych urządzeń”); następnie zostaje
wywołany STOP kiedy zostanie stwierdzona jakaś zmiana w
porównaniu z przyswojonym stanem.
Za pomocą odpowiednich narzędzi istnieje możliwość podłączenia do
wejścia STOP więcej niż jednego urządzenia, nawet innego rodzaju:
• Więcej urządzeń NA można podłączyć równolegle pomiędzy nimi
bez żadnego ograniczenia ilości.
• Więcej urządzeń NC można podłączyć szeregowo pomiędzy nimi
bez żadnego ograniczenia ilości.
• Dwa urządzenia z wyjściem na stały opór 8,2KΩ mogą być
podłączone równolegle; jeśli jest ich więcej niż 2, to mogą być
podłączone w „kaskadzie” z jednym jedynie oporem na końcu 8,2kΩ
• Możliwa jest kombinacja NA i NC ustawiając 2 kontakty równolegle
z zastrzeżeniem umieszczenia w zestawie (seryjnie) do kontaktu NC
z oporem 8,2kΩ(pozwala to także na kombinację 3 urządzeń: NA,
NC i 8,2kΩ).
Jeśli wejście STOP jest używane do podłączenia urządzeń
z funkcjami bezpieczeństwa, jedynie urządzenia na stały opór
8,2kΩ zapewniają 3 kategorię bezpieczeństwa na usterki
według normy EN 954-1.
!

126
FOTO
Fotokomórka zewnętrzna h = 50
działająca przy zamykaniu
FOTO II
Fotokomórka zewnętrzna h = 100
działająca przy zamykaniu
FOTO 1
Fotokomórka wewnętrzna h = 50
działająca przy zamykaniu
FOTO 1 II
Fotokomórka zewnętrzna h = 100
działająca przy zamykaniu
FOTO 2
Fotokomórka zewnętrzna
działająca przy otwieraniu
FOTO 2 II
Fotokomórka zewnętrzna
działająca przy otwieraniu
FOTO 3
Fotokomórka pojedyncza, która
pokrywa cała automatyzację
Instalacja FOTO 3 razem z FOTO II wymaga pozycji elementów,
które tworzą fotokomórkę (TX-RX) i są zgodne z ostrzeżeniem
podanym w książce instrukcji fotokomórek
!
7.3.3) Fotokomórki
System „BlueBUS” pozwala, poprzez adresowanie przy pomocy
odpowiednich mostków, na rozpoznanie fotokomórek przez centralę i
do przydzielenia właściwej funkcji odczytu. Operacja adresowania tak
na TX jak i na RX (ustawiając mostki w ten sam sposób) sprawdza, czy
niema innych par fotokomórek z tym samym adresem. W automatyzacji
bram przesuwanych z ROBUS350 można zainstalować fotokomórki
tak jak pokazano na rys. 22. Po instalacji lub demontażu fotokomórek
będzie trzeba wykonać fazę przyswojenia opisaną w paragrafie „7.3.4
Przyswojenie innych urządzeń”.
22
Tabela N 18: adresy fotokomórek
Fotokomórka Mostki Fotokomórka Mostki
7.3.4) Przyswajanie urządzeń
Zwykle operacja przyswojenia urządzeń podłączonych do BlueBUS i do wejścia STOP jest wykonywana podczas fazy instalacyjnej; jednak jeśli
są dodane lub zdemontowane urządzenia można powtórzyć przyswojenie w następujący sposób:
1. Wcisnąć i trzymać wciśnięte przyciski [▲] i [Set]
2. Zwolnić przyciski kiedy lampki L1 i L2 rozpoczną szybkie miganie (po około 3 sekundach)
L1 L2
3. Odczekać kilka sekund aż centrala zakończy przyswajanie urządzeń
4. Na zakończenie przyswajania lampki L1 i L2 przestaną migać, lampka STOP musi pozostać zapalona,
natomiast lampki L1...L6 zapalą się zgodnie ze stanem funkcji ON-OFF jakie przedstawiają. L1 L2
Po dodaniu lub demontażu urządzeń jest niezbędne wykonanie ponownie odbioru automatyzacji zgodnie z tym jak
podano w paragrafie „5.1 Odbiór”.
!
Tabela N 19: do przyswojenia innych urządzeń Przykład
SET
SET
7.4.1) Funkcja “Zawsze otwórz”
Funkcja „Zawsze otwórz” jest jedna z właściwości centrali kontrolnej,
która pozwala zawsze na polecenie manewru otwarcia, kiedy
sterowanie „krok-po-kroku” trwa dłużej niż 2 sekundy; jest to przydatne,
na przykład, aby podłączyć do zacisku P.P. kontaktu zegara
programującego, aby brama była otwarta w pewnym przedziale godzin
dnia. Ta właściwość jest ważna bez względu na rodzaj programowania
wejścia P.P. wyłączając programowanie w rodzaju „Zamyka”, patrz
parametr „Funkcja P.P.” w tabeli N 14.
7.4.2) Funkcja “Rusz w każdym przypadku”
W przypadku kiedy urządzenie bezpieczeństwa nie działa prawidłowo
lub nie działa w ogóle, istnieje możliwość sterowaniem i przesuwaniem
bramy w trybie „Obecność osoby”. Szczegóły są podane w paragrafie
„Sterowanie z zabezpieczeniami niedziałającymi”, znajdującym się w
załączniku „Instrukcje i ostrzeżenia przeznaczone dla użytkownika
siłownika ROBUS”.
7.4) Funkcje szczególne

PL
127
7.6) Rozwiązywanie problemów
W tabeli N 20 można znaleźć przydatne wskazówki do przezwyciężenia
ewentualnych przypadków złego działania jakie mogą się zdarzyć
podczas instalowania lub w przypadku usterki.
7.7) Diagnostyka i sygnalizacja
Niektóre urządzenia posiadają bezpośrednio specjalną sygnalizację za
pomocą, której można łatwo określić stan działania lub działanie
nieprawidłowe.
24
7.5) Podłączenie innych urządzeń
Jeśli istnieje potrzeba zasilania urządzeń zewnętrznych jak na przykład
czytnik zbliżeniowy dla legitymacji z transponderem albo światła
oświetlającego wyłącznik z kluczem, można pobrać zasilanie tak jak
pokazano na rys.23.
Napięcie zasilania wynosi 24Vprąd stały – 30%÷ +50% z
maksymalnym prądem do dyspozycji 100mA.
-+
24Vcc
23
F2
F1
Tabela N 20: odszukiwanie usterek
Symptomy Zalecane kontrole
Nadajnik radiowy nie steruje bramą i lampka na
nadajniku nie zapala się.
Nadajnik radiowy nie steruje bramą ale lampka na
nadajniku zapala się.
Nie można sterować żadnym manewrem i lampka
„BLUEBUS” nie miga.
Nie można sterować żadnym manewrem i lampka
nie pali się
Nie można sterować żadnym manewrem i lampka
wykonuje kilka mignięć.
Manewr rozpoczyna się, lecz zaraz po tym
następuje zwrot
Manewr jest wykonywany w sposób prawidłowy,
ale miganie lampki nie działa.
Manewr jest wykonywany w sposób prawidłowy
ale lampka kontrolna SCA nie działa
Sprawdzić, czy baterie nadajnika nie wyczerpały się, ewentualnie je wymienić.
Sprawdzić czy nadajnik jest prawidłowo zapamiętany w odbiorniku radiowym
Sprawdzić, czy ROBUS350 jest zasilany napięciem z sieci 230V. Sprawdzić czy nie są
uszkodzone bezpieczniki; w tym przypadku, wykryć powód uszkodzenia i następnie
wymienić bezpieczniki na nowe o tej samej wartości prądu i charakterystykach.
Sprawdzić, czy polecenie jest rzeczywiście odbierane. Jeśli polecenie dochodzi do
wejścia PP to odpowiednia lampka musi się zapalić; jeśli natomiast jest użyty nadajnik
radiowy, to lampka „BlueBUS” musi wykonać dwa szybkie mignięcia.
Policzyć ilość mignięć i sprawdzić z zawartością tabeli N 21
Wybrana siła może być za mała dla tego rodzaju bramy. Sprawdzić czy niema przeszkód i
ewentualnie wybrać większa siłę.
Sprawdzić, czy podczas manewru jest napięcie na zacisku FLASH migacza (ponieważ
jest przerywany, jego wartość napięcia niema znaczenia: około 10-30Vprad stały); jeśli
napięcie jest, to problem jest spowodowany lampką, którą należy wymienić na inną o
takich samych charakterystykach; jeśli brak napięcia, może być to przepięcie na wyjściu
FLASH, sprawdzić, czy niema zwarcia na przewodzie.
Sprawdzić rodzaj zaprogramowanej funkcji dla wyjścia SCA (Tabela N 14). Kiedy lampka
kontrolna powinna się palić, sprawdzić, czy jest napięcie na zacisku SCA (około 24Vprad
stały); jeśli napięcie jest, to problem jest spowodowany lampką kontrolną, którą należy
wymienić na inną o takich samych charakterystykach; jeśli brak napięcia, może być to
przepięcie na wyjściu SCA, sprawdzić, czy niema zwarcia na przewodzie.

128
Lampka BLUEBUS Przyczyna DZIAŁANIE
Lampka STOP Przyczyna DZIAŁANIE
Lampka P.P. Przyczyna DZIAŁANIE
Wyłączony
7.7.2) Sygnalizacja na centrali
W centrali ROBUS350 znajduje się zestaw lampek LED z, których
każda może dostarczyć specyficznych sygnałów, tak podczas
normalnej pracy jak i w przypadku zaistnienia anomalii
Tabela N 22: lampki sygnalizacyjne na zaciskach centrali
Anomalia
Poważna anomalia
Sprawdzić czy jest zasilanie; sprawdzić czy nie zadziałały bezpieczniki; w
takim przypadku sprawdzić przyczynę ich zadziałania a potem wymienić je
na nowe o tych samych wartościach.
Dostęp
Jest to poważna anomalia; spróbować wyłączyć na chwilę centralę; jeśli
stan się utrzymuje jest to poważna usterka i wymaga wymiany obwodu
drukowanego
Jedno mignięcie na sekundę Wszystko OK Prawidłowe działanie centrali
2 szybkie mignięcia Zmiana stanu wejść
Jest to normalne kiedy następuje zmiana jednego z wejść: P.P., STOP, zad-
ziałanie fotokomórek lub jest użyty nadajnik radiowy.
Seria mignięć oddzielonych 1
sekundową przerwą
Różne
Jest to taka sama sygnalizacja jak na migaczu
Patrz Tabela N 21
Wyłączony Zadziałanie wejścia STOP Sprawdzić urządzenia podłączone do wejścia STOP
Dostęp Wszystko OK Aktywne wejście STOP
Wyłączony Wszystko OK Wejście PP nie aktywne
Dostęp Zadziałanie wejścia PP
Normalne, jeśli rzeczywiście jest aktywne urządzenie podłączone do wejścia
PP.
25
6 mignięć
przerwa 1 sekunda
6 mignięć
Na początku manewru, kontrola urządzeń podłączonych do BLUEBUS nie
odpowiada tym jakie zostały zapamiętane podczas fazy przyswajania. Możliwe,
że są urządzenia uszkodzone, należy je sprawdzić i wymienić; jeśli zostały
wprowadzone zmiany należy powtórzyć przyswojenie (7.3.4 Przyswojenie innych
urządzeń)
7.7.1) Sygnalizacje z migaczem
Sygnalizator migający FLASH podczas manewru miga z częstotliwością jednego mignięcia na sekundę; kiedy zdarzą się anomalie, są podane
dwa krótkie mignięcia; i te mignięcia powtarzają się dwa razy, oddzielone sekundową przerwa.
Tabela N 21: sygnalizacja na migaczu FLASH
Szybkie miganie Przyczyna AKCJA
1 migniecie
przerwa 1 sekunda
1 migniecie
Błąd w BluBUS
2 mignięcia
przerwa 1 sekunda
2 mignięcia
Zadziałanie fotokomórk
Na początku manewru jedna lub więcej fotokomórek nie daje zgody na ruch,
sprawdzić czy niema przeszkód. Podczas ruchu jest to normalne jeśli pojawi się
jakaś przeszkoda.
3 mignięcia
przerwa 1 sekunda
3 mignięcia
Zadziałanie ogranicznika
„Siły Silnika”
Podczas ruchu brama napotkała większe tarcie; sprawdzić przyczynę
4 mignięcia
przerwa 1 sekunda
4 mignięcia
Zadziałanie wejścia STOP
Na początku manewru lub podczas ruchu powstało zadziałanie wejścia STOP;
sprawdzić przyczynę.
5 mignięć
przerwa 1 sekunda
5 mignięć
Odczekać co najmniej 30
sekund i ponowić próbę
polecenia
eśli pozostaje taki sam stan to może się okazać, że jest to poważna usterka i
wymaga wymiany obwodu drukowanego.
Przekroczono limit
manewrów na godzinę.
Odczekać kilka minut, aby ogranicznik ilości manewrów powrócił pod maksy-
malną liczbę graniczną manewrów.
7 mignięć
przerwa 1 sekunda
7 mignięć
Błąd w wewnętrznych
obwodach elektrycznych
Rozłączyć wszystkie obwody zasilania na kilka sekund, potem spróbować
powtórnie dając polecenie; jeśli stan się nie zmienia może się okazać, że jest to
poważna usterka i wymaga wymiany obwodu drukowanego

PL
129
7.8) Wyposażenie dodatkowe
Dla ROBUS350 jest przewidziane następujące dodatkowe
wyposażenie jako opcja:
• PS124 Akumulator dodatkowy 24V - 1,2Ah ze zintegrowana
ładowarką.
Patrz katalog produktów Nice S.A. – kompletny i uaktualniony wykaz
wyposażenia dodatkowego
26
Lampka L1 Opis
• Programowanie funkcji w toku
• Jeśli miga razem z L4, wskazuje że należy wykonać fazę przyswojenia urządzeń (patrz paragraf „4.4 Przy-
swojenie długości skrzydła”)
Lampka L6 Opis
Lampka L5 Opis
Lampka L3 Opis
Lampka L2 Opis
Lampka L4 Opis
Podczas normalnego działania wskazuje „Ruszanie” nie aktywneWyłączona
Wyłączona
Tabela N 23: lampki na przyciskach centrali
Podczas normalnej pracy wskazuje „Zamkniecie automatyczne” nie aktywne
Podczas normalnego działania wskazuje „Zamknięcie automatyczne” aktywne
• Programowanie funkcji w toku
• Jeśli miga razem z L2, wskazuje że należy wykonać fazę przyswojenia urządzeń (patrz paragraf „4.3 Przy-
swojenie urządzeń”)
Dostęp
Migotanie
Wyłączona Podczas normalnego działania wskazuje „Zamknij Po Foto” nie aktywne
Podczas normalnego działania wskazuje „Zamknij Po Foto” aktywne.
• Programowanie funkcji w toku
• Eśli miga razem z L1, wskazuje że należy wykonać fazę przyswojenia urządzeń (patrz paragraf „4.3 Przy-
swojenie urządzeń”)
Dostęp
Migotanie
Wyłączona Podczas normalnego działania wskazuje „Zamyka zawsze” nie aktywne.
Podczas normalnego działania wskazuje „Zamyka zawsze” aktywne.
Podczas normalnego działania wskazuje „Stand-By” nie aktywne
Podczas normalnego działania wskazuje „Stand-By” aktywny
• Programowanie funkcji w toku
• Jeśli miga razem z L3, wskazuje że należy wykonać fazę przyswojenia urządzeń (patrz paragraf „4.4 Przy-
swojenie długości skrzydła”)
Dostęp
Migotanie
Wyłączona
Dostęp
Migotanie
Podczas normalnego działania wskazuje „Ruszanie” aktywne
Programowanie funkcji w toku
Dostęp
Migotanie
Podczas normalnego działania wskazuje „Wstępne miganie” nie aktywne
Podczas normalnego działania wskazuje „Wstępne miganie” aktywne
Programowanie funkcji w toku
Wyłączona
Dostęp
Migotanie
27

Moc promieniowania
Wymiary i ciężar
Od 100 do 150m, ta odległość może ulegać zmianie w zależności od przeszkód i zakłóceń elektroma-
gnetycznych jakie ewentualnie mogą występować, a także jest uwarunkowany pozycją anteny odbiorczej.
Użytkowanie w atmosferze szczególnie kwaśnej
lub słonej albo potencjalnie wybuchowej
330 x 195 h 277; 8Kg
W celu ulepszenia swoich produktów, Nice S.A. zastrzega sobie prawo zmiany charakterystyk technicznych w jakimkolwiek momencie i bez
uprzedzenia, utrzymując jednak funkcjonalność i przeznaczenie
Wszystkie charakterystyki techniczne tutaj podane odnoszą się do temperatury otoczenia 20°C ( 5°C).
8) Charakterystyki techniczne
Typologia
Charakterystyki techniczne: ROBUS350
Elektromechaniczny siłownik do ruchu automatycznego przesuwnych bram do użytku
prywatnego wraz z kontrolną centralą elektroniczna.
Koło zębate Z: 15; Moduł: 4; Skok: 12,6mm; Średnica koła podziałowego: 60mm
Maksymalny moment ruszenia 10Nm; odpowiadający możliwości poruszenia skrzydła z tarciem statycznym do 333N
Moment nominalny 6Nm; odpowiadający możliwości utrzymania w ruchu skrzydła z tarciem dynamicznym do 200N
Prędkość momentu nominalnego
0,18m/s
Prędkość bez obciążenia (centrala pozwala na
zaprogramowanie 6 prędkości wynoszących
około: 100, 85, 70, 55, 45, 30%)
0,34m/s
Maksymalna częstotliwość cyklów prac 50 cykli /dzień (centrala ogranicza cykle do maksymalnej ilości przewidzianej w tabelach N 1 e N 2)
Maksymalny czas pracy ciągłej 10 minut (centrala ogranicza działanie ciągłe do przewidzianego maksimum w tabelach N 1 e N 2)
Ograniczenia zastosowania
Generalnie ROBUS350 jest w stanie zautomatyzować bramy o ciężarze do 350Kg lub o
długości do 15m, zgodnie z ograniczeniami przewidzianymi w tabelach N 1 e N 2.
Maksymalna moc pobrana 250VA
Klasa izolacji 1 (musi być uziom zabezpieczający)
Zasilanie awaryjne Z wyposażenia dodatkowego - opcja PS124
Wyjście do migacza Dla 1 migacza LUCYB (lampa 12V, 21W)
Wyjście BLUEBUS Jedno wyjście z obciążeniem maksymalnym 15 jednostek BlueBus
Wejście STOP
Dla kontaktów normalnie zamkniętych, normalnie otwartych lub o stałej oporności 8,2kΩ; w
auto-odczycie (jedna zmiana w porównaniu do stanu zapamiętanego powoduje polecenie
„STOP”)
Wejście PP Dla kontaktów normalnie otwartych (zamkniecie kontaktu powoduje polecenie P.P.)
Wejście ANTENA Radio 52Ω dla przewodu typu RG58 lub podobnych
Zasilanie ROBUS350
Zasilanie ROBUS350/V1
230Vac (+10% +15%) 50/60Hz.
120Vac (+10% +15%) 50/60Hz.
Funkcje programowalne 6 funkcji typu ON-OFF i 6 funkcji regulowanych (patrz tabele N 12 e N 14)
Temperatura pracy
-20°C ÷ 50°C
Nie
Stopień zabezpieczenia IP 44
Wymiary i ciężar
Funkcje w auto-przyswajaniu
Auto-przyswajanie urządzeń podłączonych do wyjścia BlueBUS. Auto-przyswajanie typu
urządzenia „STOP” (kontakt NA, NC lub oporność 8,2kΩ)
Auto-przyswajanie długości bramy i wyliczenie punktów zwalniania i otwarcia częściowego.
Wyjścia 4 (na złączu SM)
Temperatura pracy
-10°C ÷ 55°C
Typologia
Charakterystyki techniczne odbiornik radiowy: SMXI odbiornik radiowy: SMXIS
Odbiornik cztero-kanałowy do sterowania radiem
Częstotliwość 433.92MHz
Sposób kodowania Cyfrowy Rolling code 52 Bit, typ FLOR Cyfrowy Rolling code 64 Bit, typ SMILO
Kompatybilność nadajników
FLOR, VERY VR; tylko grupa pojedyncza: ERGO,
PLANO, PLANOTIME
SMILO
Nadajniki jakie mogą być
zapamiÍtane
Do 256 jeśli zapamiętane w Trybie I
Impedencja wejścia
52Ω
Czułość Większa od 0.5 V
Zasięg nadajników
72 x 40 h 18mm / 30g Średnica 48 h14mm / 18g
Stopień zabezpieczenia IP 40 (użyty w domu lub zabezpieczonym środowisku)
Temperatura pracy
-40°C ÷ 85°C
Typologia
Nadajnik dwu-kanałowy do sterowania radiem
Częstotliwość 433.92MHz
Sposób kodowania Cyfrowy Rolling code 52 Bit, typ FLOR Cyfrowy Rolling code 64 Bit, typ SMILO
Przyciski 2
Zasilanie 12V bateria typ 23A
Pobór 25mA
Trwałość baterii
1 rok, przy 10 poleceniach/dziennie o długości 1 sekunda przy temperaturze 20 C (przy niskich temperatu-
rach spada wydajność baterii)
100µW
Charakterystyki techniczne nadajnik: FLO2R-S nadajnik: SM2
130

PL
131
Gratulujemy wyboru automatyki firmy Nice! Nice S.A.
produkuje elementy do automatyzacji bram, drzwi, bram
rolowanych, rolet i markiz: siłowniki, centrale sterowania,
radiosterowanie, migacze, fotokomórki akcesoria. Firma
Nice stosuje w swoich produktach wyłącznie surowce i
obróbkę wysokiej jakości i, z powołania, poszukuje nowych
rozwiązań maksymalnie ułatwiających użytkowanie tych
urządzeń. Elementy te są wysokiej technicznej jakości,
estetyczne i ergonomiczne: w szerokiej gamie produktów
Nice wasz instalator z pewnością wybierze produkt, który
najbardziej odpowiada waszym wymaganiom. Wasza
automatyka nie jest jednak produktem firmy Nice, ale jest
produktem zrealizowanym w wyniku analiz, obliczeń, doboru
materiałów a realizacja tej instalacji powierzona jest
waszemu zaufanemu instalatorowi. Każda automatyzacja
jest wyjątkowa i tylko wasz instalator posiada odpowiednie
doświadczenie i profesjonalizm niezbędny do wykonania
urządzenia zgodnie z waszymi potrzebami, bezpieczny i
niezawodny, a przede wszystkim stworzony zgodnie ze
sztuką, a to oznacza że odpowiada obowiązującym
przepisom. Automatyka jest wygodnym rozwiązaniem,
posiada pewny system bezpieczeństwa a dzięki nielicznym
zabiegom będzie wam służył przez wiele lat. Również
automatyzacja jaka jest w waszym posiadaniu zapewnia
poziom bezpieczeństwa żądany przez normy, jakkolwiek nie
wyklucza istnienia pewnego „pozostałego zagrożenia”, to
znaczy możliwości że może stwarzać niebezpieczne
sytuacje, z reguły spowodowane nieznajomością
użytkowania lub błędem, z tego też powodu chcemy
przekazać wam niektóre rady dotyczące zachowań aby
uniknąć wszelkiego zagrożenia.
•Przed uøyciem po raz pierwszy automatyzacji, każcie
sobie wyjaśnić instalatorowi jakie mogą być pozostałe
zagrożenia i skąd pochodzą, przeznaczcie kilka minut na
przeczytanie instrukcji i ostrzeżeń dla użytkownika jakie
przekazał wam instalator. Należy przechowywać instrukcje
w celu ewentualnych późniejszych konsultacji i przekazać
ją ewentualnemu następnemu użytkownikowi
•Wasza automatyzacja jest maszyną, która dokładnie
wykonuje wasze polecenia; niewłaściwe lub nieuprawnione
użycie może stać się niebezpieczne: nie sterujcie ruchem
automatyzacji, jeśli w jej zasięgu znajdują się osoby,
zwierzęta lub przedmioty.
•Dzieci: urządzenie automatyzacji gwarantuje wysoki
stopień bezpieczeństwa. Zatrzymuje ruch, gdy jej system
zabezpieczający odczyta obecność osób lub rzeczy i
gwarantuje uaktywnienie tego sytemu w sposób pewny i
przewidziany. Bezpieczniej jednak jest zabronić dzieciom
bawienia się w pobliżu automatyki jak również
pozostawionymi bez nadzoru pilotami, aby uniknąć
nieumyślnego włączenia:
nadajniki sterowania to nie
zabawka!
•Anomalie: Jeśli tylko zanotujecie jakiekolwiek anormalne
zachowanie systemu automatyzacji, natychmiast odłączcie
zasilanie elektryczne od urządzenia i wykonajcie
odblokowanie ręczne. Nie próbujcie sami wykonać
jakiejkolwiek naprawy, lecz zwróćcie się o pomoc do
waszego zaufanego instalatora W międzyczasie urządzenie
może działać jako otwieranie bez automatyzacji, po
odblokowaniu siłownika, tak jak to wcześniej opisano.
•Konserwacja: Automatyka, jak każda maszyna, wymaga
okresowych czynności konserwacyjnych, co gwarantuje jej
bezpieczne i długoletnie funkcjonowanie. Uzgodnijcie z
waszym instalatorem program okresowych przeglądów
konserwacyjnych. Firma Nice zaleca, aby przeglądy
wykonywać co sześć miesięcy, ale zależy to też od
intensywności użytkowania. Jakikolwiek przegląd, związany
z czynnościami konserwacyjnymi czy naprawą, musi być
wykonany wyłącznie przez wykwalifikowany personel.
•Nawet jeśli uważacie że potraficie, nie zmieniajcie
urządzenia i parametrów programowania oraz nie regulujcie
automatyki: należy to do waszego instalatora.
•Odbiór, konserwacje okresowe i ewentualne naprawy
muszą być udokumentowane przez wykonującego je a
dokumentacja przechowywana przez właściciela
urządzenia.
Jedyne interwencje jakie są możliwe do wykonania
przez was, i które zalecamy wam przeprowadzać okresowo
to czyszczenie szybek fotokomórek i usuwanie
ewentualnych liści i kamieni, które mogłyby przeszkodzić
przesuwowi.Aby uniemożliwić, aby ktokolwiek uruchomił
bramę, przed rozpoczęciem tych prac pamiętajcie o
odblokowaniu automatyzmu (tak jak wcześniej to opisano) a
do czyszczenia używajcie jedynie ściereczki lekko
nasączonej wodą.
•Likwidacja: Po zakończeniu żywota automatyzacji
zapewnijcie, aby likwidacja została przeprowadzona przez
wykwalifikowany personel i aby materiały zostały poddane
recyklingowi lub likwidacji zgodnie z przepisami
obowiązującymi na poziomie lokalnym.
•W przypadku uszkodzenia lub braku zasilania:
Oczekując na waszego instalatora, albo w przypadku
powrotu energii elektrycznej, jeśli urządzenie nie jest
wyposażone w dodatkowy akumulator, automatyzacja
może być użyta jako otwieranie nie automatyczne. W tym
celu należy wykonać odblokowanie ręczne (jedyne
działanie dozwolone użytkownikowi): taka operacja została
szczególnie przemyślana przez Nice, aby zapewnić wam
maksymalną łatwość bez użycia specjalnych narzędzi lub
dużego wysiłku fizycznego.
Instrukcje i ostrzeżenia przeznaczone dla użytkownika siłownika ROBUS
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
-
 1
1
-
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
-
46
-
47
-
48
-
49
-
50
-
51
-
52
-
53
-
54
-
55
-
56
-
57
-
58
-
59
-
60
-
61
-
62
-
63
-
64
-
65
-
66
-
67
-
68
-
69
-
70
-
71
-
72
-
73
-
74
-
75
-
76
-
77
-
78
-
79
-
80
-
81
-
82
-
83
-
84
-
85
-
86
-
87
-
88
-
89
-
90
-
91
-
92
-
93
-
94
-
95
-
96
-
97
-
98
-
99
-
100
-
101
-
102
-
103
-
104
-
105
-
106
-
107
-
108
-
109
-
110
-
111
-
112
-
113
-
114
-
115
-
116
-
117
-
118
-
119
-
120
-
121
-
122
-
123
-
124
-
125
-
126
-
127
-
128
-
129
-
130
-
131
-
132
-
133
-
134
-
135
-
136
-
137
-
138
-
139
-
140
-
141
-
142
-
143
-
144
-
145
-
146
-
147
-
148
-
149
-
150
-
151
-
152
-
153
-
154
-
155
-
156
- Typ
- Instrukcja obsługi
w innych językach
- español: Nice Automation ROBUS350 El manual del propietario
- italiano: Nice Automation ROBUS350 Manuale del proprietario
- Deutsch: Nice Automation ROBUS350 Bedienungsanleitung
- français: Nice Automation ROBUS350 Le manuel du propriétaire
- English: Nice Automation ROBUS350 Owner's manual
- Nederlands: Nice Automation ROBUS350 de handleiding
Powiązane dokumenty
-
Nice Automation Run Instrukcja obsługi
-
-
Nice PS Series Instrukcja obsługi
-
-
-
Nice TT2L and TT2D Instrukcja obsługi
-
-
-
-
Inne dokumenty
-
-
-
-
 Moovo LN Instrukcja obsługi
Moovo LN Instrukcja obsługi
-
 NiceHome FILO 400 / 600 Instrukcja obsługi
NiceHome FILO 400 / 600 Instrukcja obsługi
-
Nice ROBUS RB400 Quick Manual
-
 Mhouse RG Instrukcja obsługi
Mhouse RG Instrukcja obsługi
-
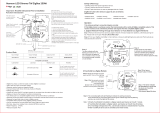 NAMRON 1402768 LED Dimmer TW ZigBee 250W Instrukcja obsługi
NAMRON 1402768 LED Dimmer TW ZigBee 250W Instrukcja obsługi
-
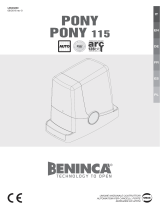 Beninca PONY Instrukcja obsługi
Beninca PONY Instrukcja obsługi
-
Condair Draabe Neo Instrukcja obsługi




