Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...

132
Indie: pag.
1 Ostrzeżenia 133
2 Opis produktu i jego przeznaczenie 134
2.1 Ograniczenia w użytkowaniu 134
2.2 Typowa instalacja 136
2.3 Wykaz przewodów 136
3 Instalacja 137
3.1 Kontrola wstępna 137
3.2 Mocowanie siłownika 137
3.3 Mocowanie zderzaków wyłącznika krańcowego w
wersjach z wyłącznikiem indukcyjnym 138
3.4 Instalowanie innych urządzeń 139
3.5 Połączenia elektryczne 139
3.6 Opis połączeń elektrycznych 140
4 Końcowe kontrole i uruchomienie 140
4.1 Wybór kierunku 140
4.2 Podłączenie zasilania 140
4.3 Rozpoznanie dołączonych urządzeń 140
4.4 Rozpoznanie długości skrzydła 141
4.5 Kontrola ruchu bramy 141
4.6 Funkcje fabrycznie ustawione 141
4.7 Odbiornik radiowy 141
5 Odbiór i przekazanie do eksploatacji 141
5.1 Próby odbiorcze 142
5.2 Przekazanie do eksploatacji 142
6 Konserwacja i likwidacja 142
6.1 Konserwacja 142
6.2 Likwidacja 142
7 Rozszerzenie wiadomości 143
7.1 Przyciski do programowania 143
7.2 Programowanie 143
7.2.1 Funkcje pierwszego poziomu (funkcje ON-OFF) 143
7.2.2 Programowanie pierwszego poziomu
(funkcje ON-OFF) 144
7.2.3 Funkcje drugiego poziomu
(parametry regulowane) 144
7.2.4 Programowanie drugiego poziomu
(parametry regulowane) 145
7.2.5 Przykład programowania pierwszego poziomu
(funkcje ON-OFF) 146
7.2.6 Przykład programowania drugiego poziomu
(parametry regulowane) 146
7.3 Dodawanie lub usuwanie urządzeń 146
7.3.1 BlueBUS 146
7.3.2 Wejście STOP 147
7.3.3 Fotokomórki 147
7.3.4 Czujnik fotooptyczny FT210B 147
7.3.5 ROBUS w trybie „Slave” 148
7.3.6 Rozpoznawanie innych urządzeń 149
7.4 Funkcje specjalne 149
7.4.1 Funkcja „Otwiera zawsze” 149
7.4.2 Funkcja “Otwórz awaryjnie” 149
7.4.3 Wezwanie do konserwacji 149
7.5 Podłączenie innych urządzeń 150
7.6 Rozwiązywanie problemów 151
7.6.1 Wykaz dotychczasowych anomalii 151
7.7 Diagnostyka i sygnalizacja 151
7.7.1 Sygnalizacja za pomocą lampy ostrzegawczej 152
7.7.2 Sygnalizacja diodami na centrali 152
7.8 Akcesoria 153
8 Dane techniczne 154
Instrukcje i ostrzeżenia przeznaczone dla użytkownika
siłownika ROBUS. 155
Robus
600/600P
1000/1000P

133
PL
1) Ostrzeżenia
Ta instrukcja zawiera ważne informacje dotyczące bezpieczeństwa
podczas instalowania, należy się z nią zapoznać przed rozpoczęciem prac
instalacyjnych. Niniejszą instrukcję należy przechowywać w celu
ewentualnej, przyszłej konsultacji. Biorąc pod uwagę niebezpieczeństwa,
jakie mogą wystąpić podczas instalowania i użytkowania siłownika ROBUS,
dla zwiększenia bezpieczeństwa, instalacja musi odpowiadać przepisom,
normom i uregulowaniom prawnym.
W tym rozdziale są przywołane wszystkie ostrzeżenia ogólne. Inne, ważne
ostrzeżenia są podane w rozdziałach „3.1 Kontrola wstępna” i „5 Odbiór i
przekazanie do eksploatacji”.
Według obowiązujących przepisów europejskich, wykonanie
drzwi lub bramy automatycznej musi być zgodne z Dyrektywą
98/37/CE (Dyrektywa Maszynowa), a w szczególności musi
odpowiadać normom: EN 13241-1 (norma zharmonizowana); EN
12445; EN 12453 oraz EN 12635, które umożliwiają
zadeklarowanie zgodności z dyrektywa maszynową.
Dodatkowe informacje, wytyczne do analiz zagrożeń i Książka Techniczna,
są dostępne na stronie: www.niceforyou.com.
Niniejsza instrukcja jest przeznaczona wyłącznie dla wykwalifikowanego
personelu instalującego. Poza załączoną instrukcją: “Instrukcje i ostrzeżenia
przeznaczone dla użytkownika siłownika ROBUS”, żadna inna informacja
zawarta w niniejszej broszurze nie jest przeznaczona dla ostatecznego
użytkownika!
• Użycie siłownika ROBUS do innych celów niż przewidziano w niniejszej
instrukcji jest zabronione; użycie niezgodne z przeznaczeniem może
spowodować zagrożenie i wyrządzić szkody ludziom oraz przedmiotom.
• Przed rozpoczęciem instalowania należy wykonać analizę zagrożeń z
wykazem podstawowych warunków bezpieczeństwa, przewidzianych w
załączniku I Dyrektywy Maszynowej, wskazując odpowiednie
rozwiązania, jakie należy zastosować.
Przypomina się, że analiza zagrożeń jest jednym z dokumentów
składowych “książki technicznej” automatyki.
• Sprawdzić, czy niezbędne są inne urządzenia do skompletowania
automatyki z siłownikiem ROBUS zgodnie ze specyficzną sytuacją
dotyczącą zastosowania, oraz z istniejącymi zagrożeniami; należy wziąć
pod uwagę, na przykład, niebezpieczeństwo uderzenia, zgniecenia,
obcięcia, szarpnięcia, itd., oraz innych zagrożeń, jakie mogą wystąpić.
• Nie wykonywać żadnych zmian i modyfikacji, jeśli nie są one
przewidziane w niniejszej instrukcji; operacje tego rodzaju mogą jedynie
spowodować niewłaściwe działanie; NICE nie bierze odpowiedzialności
za szkody spowodowane przez zmodyfikowany produkt.
• Podczas instalowania i użytkowania należy uważać, aby do wnętrza
centrali i innych urządzeń, gdy są otwarte, nie dostały się elementy stałe
lub płyny; ewentualnie należy zwrócić się wtedy do serwisu technicznego
NICE; użytkowanie ROBUS w takich sytuacjach może spowodować
niebezpieczeństwo.
• Nie wolno używać automatyki przed przekazaniem do eksploatacji
według tego, jak przedstawiono w rozdziale: "5 Odbiór i przekazanie do
eksploatacji".
• Opakowanie ROBUS musi być zlikwidowane zgodnie z odpowiednimi
miejscowymi przepisami.
• Gdy naprawa wykonana według wskazówek umieszczonych w niniejszej
instrukcji nie da oczekiwanego efektu należy skontaktować się z
serwisem firmy NICE.
• Po zadziałaniu wyłączników automatycznych lub bezpieczników i przed
ich przywróceniem do pierwotnej postaci, należy określić i wyeliminować
usterkę.
• Przed otwarciem pokrywy osłaniającej zaciski siłownika ROBUS, należy
odłączyć wszystkie obwody zasilające; jeśli urządzenie wyłączające jest
niewidoczne z miejsca pracy, należy zawiesić tablicę: "UWAGA! PRACE
KONSERWACYJNE W TOKU".
Szczegółowe ostrzeżenia na temat zgodności użytkowania tego produktu
w odniesieniu do Dyrektywy maszynowej 98/37/CE (dawna 89/392/CEE):
• Niniejszy produkt wprowadzony zostaje na rynek jako "element składowy
urządzenia", co oznacza, że skonstruowany został w celu umieszczenia
go w innym urządzeniu lub połączenia z innymi urządzeniami w celu
stanowienia "maszyny" w rozumieniu dyrektywy 98/37/CE jedynie w
połączeniu z innymi komponentami oraz w sposób taki, jak to opisano w
niniejszej instrukcji użytkownika. Zgodnie z postanowieniami dyrektywy
98/37/CE ostrzega się: przekazanie do eksploatacji powyższego
produktu nie jest dozwolone, dopóki producent maszyny zawierającej ten
produkt nie zidentyfikuje go i nie zadeklaruje jako zgodnego z dyrektywą
98/37/CE.
Szczególna ostrożność należy zachować w zakresie użytkowania tego
produktu pod kątem jego zgodności z dyrektywą “Niskiego Napięcia”
73/23/CEE wraz z późniejszymi zmianami 93/68/CEE:
• Produkt niniejszy odpowiada cechom wymaganym przez dyrektywę
“Niskiego Napięcia’ o ile zastosowany jest w konfiguracjach
przewidzianych w niniejszym podręczniku użytkownika oraz w połączeniu
z artykułami wymienionymi w katalogu produktów firmy Nice S.p.a.
Charakterystyki te mogłyby nie być gwarantowane, jeśli produkt
użytkowany jest w konfiguracjach z innymi produktami,
nieprzewidzianymi; zabrania się użytkowania niniejszego produktu w
połączeniu z takimi wyrobami póki osoba dokonująca instalacji nie
upewni się co do zgodności z wymaganiami przewidywanymi przez
dyrektywę.
Szczególną uwagę należy zwrócić na użytkowanie niniejszego produktu z
punktu widzenia dyrektywy o “zgodności elektromagnetycznej 89/336/CEE
wraz z późniejszymi zmianami 92/31/CEE oraz 93/68/CEE:
• Niniejszy produkt został poddany badaniom w zakresie zgodności
elektromagnetycznej w skrajnych sytuacjach użytkowania, w
konfiguracjach przewidywanych w niniejszym podręczniku użytkownika
oraz w połączeniu z artykułami znajdującymi się w katalogu produktów
firmy Nice S.p.a.
Zgodność elektromagnetyczna może nie być zagwarantowana jeśli
produkt użytkowany będzie w połączeniu z innymi wyrobami
nieprzewidzianymi; zabronione jest użytkowanie niniejszego produktu w
takich sytuacjach póki osoba dokonująca instalacji nie upewni się co do
zgodności z wymaganiami zawartymi w dyrektywie
!

134
ROBUS to linia siłowników elektromechanicznych samohamownych,
przeznaczonych do napędu bram przesuwnych. Wyposażone są one
w elektroniczną centralkę sterowniczą oraz w złącze dla odbiornika
sygnału radiowego SMXI lub SMXIS (opcjonalnie). Podłączenia
elektryczne dla urządzeń zewnętrznych są uproszczone dzięki użyciu
systemu „BlueBUS”, co pozwala na podłączenie wielu urządzeń za
pomocą jedynie 2 przewodów. Siłowniki ROBUS działają przy pomocy
energii elektrycznej, a w przypadku braku napięcia w sieci elektrycznej,
można wysprzęglić je za pomocą odpowiedniego klucza i przesunąć
ręcznie bramę, lub też można zastosować urządzenie opcjonalne:
akumulator awaryjny PS124 umożliwiający wykonanie pewnych
czynności także w przypadku braku zasilania sieciowego.
Do linii ROBUS należą produkty, których główne cechy opisane zostały w tabeli 1.
Uwaga: 1 kg = 9,81 N, czyli, na przykład: 600 N = 61 kg
2) Opis produktu i jego przeznaczenie
1
Siłownik typu RB600 RB600P RB1000 RB1000P
Typ wyłącznika krańcowego
elektromechanicznego zbliżeniowego indukcyjnego elektromechanicznego zbliżenia indukcyjnego.
Maksymalna długość skrzydła 8m 12m
Maksymalny ciężar skrzydła 600 Kg 1000 Kg
Maksymalny moment startowy 18Nm 27Nm
(odpowiadający sile) (600N) (900N)
Silnik i transformator Silnik 24Vcc Ø 77mm Silnik 24Vcc Ø 115mm
Transformator kolumnowy EI Transformator toroidalny
Tabela 1: porównanie najważniejszych danych siłowników ROBUS
2.1) Ograniczenia w użytkowaniu
Dane dotyczące wydajności produktów linii ROBUS podane są w
rozdziale “8 Dane techniczne“ i są jedynymi wartościami, jakie
pozwalają na właściwą ocenę możliwości użycia.
Charakterystyki konstrukcyjne siłowników ROBUS sprawiają, ze są one
przydatne w przypadku skrzydeł przesuwnych, zgodnie z
ograniczeniami podanymi w tabelach 2, 3, i 4.
Rzeczywista przydatność siłownika ROBUS do zautomatyzowania
określonej bramy przesuwnej zależna jest od sił tarcia i innych
czynników, także okazjonalnych, takich jak obecność lodu, który
mógłby przeszkodzić w ruchu skrzydła.
W celu dokonania rzeczywistej oceny absolutnie koniecznym jest
dokonanie pomiaru siły niezbędnej do poruszenia skrzydła na całym
jego przebiegu i upewnienie się, że nie przekroczy ona połowy wartości
„momentu nominalnego” podanego w rozdziale “8 Dane techniczne”
(zalecany jest margines 50% gdyż warunki klimatyczne mogą
doprowadzić do zwiększenia tarcia); ponadto w celu ustalenia ilości
cykli na godzinę; kolejnych cykli oraz maksymalnej dopuszczalnej
prędkości należy wziąć pod uwagę informacje podane w tabelach 2 i
3.
RB600, RB600P RB1000, RB1000P
Długość skrzydła (m)
maksymalna ilość cykli/godzinę maksymalna ilość kolejnych cykli maksymalna ilość cykli/godzinę maksymalna ilość kolejnych cykli
Do 4 40205025
4 ÷ 6 25 13 33 16
6 ÷ 8 20 10 25 12
8 ÷ 10 --- --- 20 10
10 ÷ 12 --- --- 16 8
Tabela 2: ograniczenia wynikające z długości skrzydła
330mm 210mm
303mm
92mm

135
PL
Długość skrzydła pozwala na określenie maksymalnej ilości cykli na godzinę, oraz ilości cykli kolejno następujących, natomiast ciężar bramy
pozwala na określenie procentowej redukcji cykli i maksymalnej dozwolonej prędkości; na przykład dla ROBUS 1000, jeśli skrzydło ma 5m
długości byłoby możliwe 33 cykli/godzinę i 16 cykli kolejnych, natomiast jeśli skrzydło waży 700 kg należy zmniejszyć je o 50%, zatem w rezultacie
otrzymamy 16 cykli na godzinę oraz 8 cykli kolejnych, natomiast maksymalna prędkość dopuszczalna wyniesie V4: szybko.
Dla zapobieżenia przegrzaniu, w centrali zamontowany jest ogranicznik, który oblicza obciążenie silnika i czas trwania cykli i interweniuje, kiedy
zostaje przekroczona maksymalna wartość graniczna. Ogranicznik manewrów mierzy także temperaturę otoczenia ograniczając dodatkowo liczbę
manewrów w przypadku szczególnie wysokich temperatur.
W rozdziale “8 Dane techniczne” podano szacunkowo “trwałość”, to znaczy średni okres użytkowania wyrobu.
Wartość ta jest silnie zależna od wskaźnika trudności manewrów, to znaczy od sumy wszystkich czynników mających wpływ na zużycie.
Należy wiec zsumować wszelkie wartości trudności znajdujące się w tabeli 4 i porównać z wykresem oszacowanej trwałości.
Na przykład Robus 1000 zamontowany do bramy 650 kilogramowej i o długości 5 m, z fotokomórkami i bez innych prawdopodobnych
czynników obciążających otrzymuje wskaźnik trudności równy 50% (30+10-10). Na podstawie wykresu szacowana trwałość wynosi 80.000 cykli.
RB600, RB600P RB1000, RB1000P
Ciężar skrzydła (kg) Procentowa Dozwolona prędkość Procentowa Dozwolona prędkość
redukcja cykli maksymalna redukcja cykli maksymalna
Do 200 100% V6 = najszybciej 100% V6 = najszybciej
200 ÷ 400 80 V5 = bardzo szybko 90 V5 = bardzo szybko
400 ÷ 500 60 V4 = szybko 75 V4 = szybko
500 ÷ 600 50 V3 = średnio szybko 60 V4 = szybko
600 ÷ 800 --- --- 50 V3 = średnio
800 ÷ 900 --- --- 45 V3 = średnio
900 ÷ 1000 --- --- 40 V3 = średnio
Tabela 3: ograniczenia wynikające z ciężaru skrzydła
Wskaźnik trudności % Robus Trwałość w cyklach
600 1000
Ciężar skrzydła kg
Do 200 10 5
200 Ö 400 30 10
400 Ö 600 50 20
600 Ö 700 --- 30
700 Ö 800 --- 40
800 Ö 900 --- 50
900 Ö 1000 --- 60
Długość skrzydła w metrach
Fino a 4 10 5
4 Ö 6 20 10
6 Ö 8 35 20
8 Ö 10 --- 35
10 Ö 12 --- 50
Pozostałe czynniki obciążeniowe
(przy założeniu, że prawdopodobieństwo ich
wystąpienia jest większe niż 10%)
Temperatura otoczenia wyższa od 40oC lub
niższa od 0oC, lub wilgotność wyższa od 80%
10 10
Występowanie kurzu lub piasku 15 15
Występowanie zasolenia 20 20
Przerywanie manewru przez fotokomórkę Foto 15 10
Przerywanie manewru przez Stop 25 20
Prędkość wyższa od “L4 szybko” 20 15
Moment startowy (uruchomiony) 25 20
Łączny wskaźnik trudności %:
Uwaga: jeśli wskaźnik trudności przekracza 100% oznacza to, że warunki wykraczają poza granice możliwe do przyjęcia.
Tabela 4: szacunkowa trwałość jako wskaźnik trudności manewrów.
Wskaźnik trudności %
Trwałość w cyklach

136
2.2) Typowa instalacja
Na rys. 2 zilustrowano typową instalację bramy przesuwanej automatycznie przy pomocy siłownika ROBUS
2
1 Przełącznik kluczowy
2 Fotokomórki na kolumience
3 Fotokomórki
4 Listwa pierwotna stała (opcja)
5 Listwa pierwotna ruchoma
6 Zderzak wyłącznika krańcowego „Otwarty”
7 Listwa zębata
8 Listwa wtórna stała (opcja)
9 Lampa ostrzegawcza z wbudowaną anteną
10 Siłownik ROBUS
11 Zderzak wyłącznika krańcowego “Zamknięte”.
12 Listwa wtórna ruchoma (opcja)
13 Radionadajnik
2.3) Wykaz przewodów
W typowej instalacji przedstawionej na rysunku 2 uwidocznione są także przewody niezbędne do podłączenia różnych urządzeń; w tabeli nr 5
podane są charakterystyki przewodów.
Zastosowane przewody powinny odpowiadać rodzajowi instalacji, na przykład zaleca się przewód typu H03VV-F do
instalowania we wnętrzach lub przewód H07RN-F do instalowania na zewnątrz.
!
Uwaga 1: jeśli przewód zasilający jest dłuższy niż 30m, to zastosować należy przewód o większym przekroju, na przykład 3x2,5mm
2
, oraz
niezbędne jest dodatkowe uziemienie w pobliżu automatyki.
Uwaga 2: jeśli przewód “BlueBUS” jest dłuższy niż 30m, ale nie dłuższy niż 50m, to należy zastosować przewód 2x1mm
2
.
Uwaga 3: dwa przewody 2x0,5mm
2
mogą być zastąpione jednym przewodem 4x0,5mm
2
.
Uwaga 4: jeśli zastosowano więcej niż jedną listwę, patrz paragraf “7.3.2 Wejście STOP” dla rodzaju zalecanego połączenia.
Uwaga 5: do połączenia listew ruchomych na skrzydłach przesuwnych należy wykorzystać odpowiednie urządzenia, które pozwalają na
połączenie elektryczne również wtedy, kiedy skrzydło jest w ruchu.
Podłączenie Rodzaj przewodu Maksymalna dozwolona długość
A: Linia elektryczna zasilająca szt. 1 przewód 3x1,5mm
2
30m (uwaga 1)
B: Lampa ostrzegawcza z anteną szt. 1 przewód 2x0,5mm
2
20m
szt. 1 przewód ekranowany typu RG58 20m (zalecany krótszy od 5m)
C: Fotokomórki szt. 1 przewód 2x0,5mm
2
30m (uwaga 2)
D: Przełącznik na klucz szt. 2 przewody 2x0,5mm
2
(uwaga 3) 50m
E: Listwy stałe szt. 1 przewód 2x0,5mm
2
(uwaga 4) 30m
F: Listwy ruchome szt. 1 przewÛd 2x0,5mm
2
(uwaga 4) 30m (uwaga 5)
Tabela 5: wykaz przewodów
2
43 38
10
2
6
11
7
9
13
1251
EC F
D
C
F
A
B

137
PL
3.2) Mocowanie siłownika
Jeśli powierzchnia podparcia już istnieje, mocowanie siłownika należy
wykonać bezpośrednio na tej powierzchni, wykorzystując do tego celu
odpowiednie środki jak na przykład kołki rozporowe.
W przeciwnym przypadku, w celu zamocowania siłownika należy:
1. Wykonać wykop pod fundament o odpowiednich wymiarach
wykorzystując jako odniesienie wartości podane na rys.3.
2. Przygotować jedną lub więcej rurek do przeprowadzenia
przewodów elektrycznych, jak na rys. 4.
3. Dołączyć dwie śruby fundamentowe do płyty fundamentowej,
wkładając jedną nakrętkę pod a drugą nad płytę; nakrętkę dolną
należy dokręcić do końca gwintu (jak na rysunku 5, w taki sposób,
aby część nagwintowana wystawała około 25÷35mm ponad płytą.
4. Wylać beton, i zanim zacznie tężeć, ustawić płytę fundamentową
według wartości podanych na rys. 3; sprawdzić czy jest równoległa
do skrzydła i dokładnie wypoziomowana, rys. 6. Odczekać do
pełnego związania betonu.
5. Odkręcić dwie górne nakrętki z płyty, ustawić na niej siłownik,
sprawdzić czy jest dokładnie równoległy do skrzydła i następnie
lekko dokręcić 2 nakrętkami i podkładkami, będącymi na
wyposażeniu, tak jak na rys. 7.
Instalacja siłownika ROBUS musi być wykonana przez wykwalifikowany personel, zgodnie z przepisami, normami i
uregulowaniami prawnymi, oraz według niniejszej instrukcji.
!
3) Instalacja
3.1) Kontrola wstępna
Przed przystąpieniem do instalacji siłownika ROBUS, należy
przeprowadzić następujące kontrole:
• Sprawdzić, czy wszystkie elementy i materiały, jakie będą zastosowane,
są w idealnym stanie, odpowiednie do użycia i zgodne z normami.
• Sprawdzić, czy konstrukcja bramy jest odpowiednia do wykonania
automatyzacji.
• Sprawdzić, czy ciężar i wymiary skrzydła mieszczą się w granicach
podanych w rozdziale „2.1 Ograniczenia w użytkowaniu”.
• Sprawdzić, porównując z wartościami podanymi w rozdziale „8 Dane
techniczne”, czy siła niezbędna do poruszenia skrzydła jest mniejsza
od połowy “Momentu maksymalnego”, i czy siła potrzebna do
utrzymania ruchu skrzydła jest mniejsza od połowy “Momentu
nominalnego”; zaleca się tu margines 50% wartości sił, ponieważ
niesprzyjające warunki klimatyczne mogą zwiększać tarcie.
• Sprawdzić, czy na całej drodze przesuwu skrzydła, tak przy
zamykaniu jak i przy otwieraniu, nie ma miejsc gdzie występuje
zwiększony opór.
• Sprawdzić, czy nie ma niebezpieczeństwa wykolejenia się skrzydła i
czy nie występuje zagrożenie wysunięcia się z prowadnic.
• Sprawdzić wytrzymałość mechanicznych ograniczników ruchu, czy
nie powstaną odkształcenia nawet, jeśli skrzydło miałoby uderzyć
silnie w zderzak.
•
Sprawdzić, czy skrzydło pozostaje w równowadze, czyli nie porusza się
samoczynnie, jeśli jest zatrzymane i pozostawione w dowolnym położeniu.
• Sprawdzić strefę mocowania siłownika, czy nie jest narażona na
zalanie i ewentualnie przewidzieć zamontowanie siłownika na
odpowiednim wsporniku nad ziemią.
• Sprawdzić, czy strefa mocowania siłownika pozwala na jego
wysprzęglenie oraz bezpieczny i pewny przesuw ręczny.
• Sprawdzić, czy punkty mocowania różnych urządzeń są w miejscach
zabezpieczonych przed uderzeniami i czy powierzchnie montażu są
odpowiednio solidne.
• Uważać, aby nie zanurzać elementów automatyki w wodzie lub
innych płynach.
• Nie ustawiać siłownika ROBUS w pobliżu płomieni lub źródeł ciepła,
w środowisku potencjalnie wybuchowym, szczególnie kwaśnym lub
słonym, ponieważ może to uszkodzić ROBUS i stać się powodem
nieprawidłowego działania albo spowodować inne zagrożenie.
• W przypadku istnienia przejścia (bramki) wewnątrz skrzydła lub w
obszarze ruchu skrzydła, należy upewnić się, że nie utrudnia ono
normalnego przesuwu i ewentualnie przewidzieć odpowiedni system
blokujący.
• Podłączyć centralę do elektrycznej linii zasilającej wyposażonej w
uziemienie zabezpieczające.
• Elektryczna linia zasilająca musi być odpowiednio zabezpieczona
przez właściwe bezpieczniki magnetyczno-termiczne i różnicowe.
• Na linii zasilającej z sieci elektrycznej należy zamontować urządzenie
rozłączające zasilanie (z kategorią przepięcia III czyli odległość między
stykami musi wynosić przynajmniej 3,5mm) albo inne, równorzędne
urządzenie, na przykład wtyczkę i gniazdko. Jeśli urządzenie
rozłączające nie znajduje się w pobliżu automatu, to należy
zabudować system blokady przed przypadkowym lub
nieuprawnionym włączeniem.
3
4
5
6
25÷35
7
192
330 0÷50
0÷50 330
192
0÷10
0÷10

138
3.3) Mocowanie zderzaków wyłącznika krańcowego w wersjach z wyłącznikiem indukcyjnym.
W celu uniknięcia przypadku, gdy ciężar skrzydła obciąża
siłownik niezbędne jest, aby pomiędzy listwą zębatą a kołem
zębatym pozostawiony został luz na około 1÷2mm, tak jak
wskazano na rys. 10.
8. Przesunąć skrzydło i wykorzystywać zawsze koło zębate jako punkt
odniesienia do mocowania następnych elementów listwy.
9. Odciąć ostatni, nadmiarowy, odcinek listwy.
10.
Wykonać szereg ruchów polegających na zamykaniu i otwieraniu i
sprawdzić, czy listwa zębata przechodzi prawidłowo po kole zębatym, z
odstępstwem liniowym nie większym niż 5 mm, i czy na całej jej długości
jest zachowany luz 1÷2 mm pomiędzy kołem zębatym a listwą.
11. Energicznie dokręcić nakrętki mocujące siłownik, upewniając się,
że jest on właściwie zamocowany do podłoża; przykryć nakrętki
mocujące odpowiednimi kapturkami tak, jak na rys. 11.
12. Zamocować zderzak wyłącznika krańcowego w sposób opisany
poniżej (dla wersji RB600P oraz RB1000P zamocować zderzaki w
sposób opisany w paragrafie „3.3 Mocowanie zderzaków
wyłącznika krańcowego w wersjach z wyłącznikiem indukcyjnym”):
•
Przesunąć ręcznie skrzydło do położenia otwartego pozostawiając
co najmniej 2 – 3cm od zderzaka mechanicznego.
•
Przesunąć zderzak po listwie zębatej w kierunku otwierania aż do
zadziałania wyłącznika krańcowego. Następnie przesunąć
jeszcze zderzak o przynajmniej 2 cm i zablokować go
odpowiednimi wkrętami do listwy zębatej, jak na rysunku 12.
• Taką samą czynność wykonać dla wyłącznika krańcowego zamknięcia.
13.
Zablokować siłownik tak, jak podano w paragrafie “Odblokowanie i
ruch ręczny” w rozdziale “Instrukcje i ostrzeżenia przeznaczone dla
użytkownika siłownika ROBUS"
!
8 9 10
11 12
Jeśli na bramie jest już listwa zębata, to po zamocowaniu siłownika
należy ustawić kołki regulacyjne tak jak na rys. 8, aby ustawić koło
zębate siłownika ROBUS na odpowiedniej wysokości, pozostawiając
na listwie zębatej luz na około 1÷2mm. W przeciwnym wypadku, aby
zamocować listwę zębatą należy:
6. Odblokować siłownik w sposób podany w paragrafie
“Wysprzęglanie i ruch ręczny” w paragrafie “Instrukcje i ostrzeżenia
przeznaczone dla użytkownika siłownika ROBUS”.
7. Otworzyć (odsunąć) całkowicie skrzydło, oprzeć pierwszy odcinek
listwy zębatej na kole zębatym i sprawdzić czy początek listwy
odpowiada początkowi skrzydła, tak jak pokazano na rysunku 9.
Sprawdzić, czy pomiędzy kołem zębatym i listwą zachowany jest luz
na około 1÷2mm, następnie zamocować odpowiednimi
narzędziami listwę zębatą do skrzydła.
1÷2
W wersjach RB600P oraz RB1000P korzystających z wyłączników
krańcowych indukcyjnych zbliżeniowych należy zamocować zderzaki w
sposób opisany w dalszej części.
1. Przesunąć ręcznie skrzydło do położenia otwartego pozostawiając
co najmniej 2 – 3cm od ogranicznika mechanicznego ruchu.
2. Przesunąć zderzak po listwie zębatej w kierunku otwarcia aż
odpowiednia dioda zgaśnie, jak na rysunku 13. Następnie
przesunąć zderzak jeszcze o przynajmniej 2 cm i zamocować
odpowiednimi wkrętami zderzak do listwy zębatej.
3. Przesunąć ręcznie skrzydło do położenia zamkniętego
pozostawiając co najmniej 2 – 3cm od zderzaka mechanicznego.
4. Przesunąć zderzak po listwie zębatej w kierunku zamknięcia aż
odpowiednia dioda wyłączy się. Następnie przesunąć zderzak o
przynajmniej 2 cm i zablokować ją odpowiednimi wkrętami do listwy
zębatej.
W wyłącznikach krańcowych indukcyjnych zbliżeniowych
optymalna odległość zderzaka zawiera się pomiędzy 3 a 8
mm, jak to wskazano na rysunku 14.
!
13
14
3÷8

139
PL
3.5) Połączenia elektryczne
Wszystkie podłączenia elektryczne muszą być wykonane
po odcięciu napięcia do urządzenia i z odłączonym
ewentualnym akumulatorem awaryjnym.
1. Aby zdjąć pokrywę zabezpieczającą i dostać się do elektronicznej
centrali sterującej siłownika ROBUS, należy wykręcić śrubę z boku
obudowy i zdjąć pokrywę, pociągając ją w górę.
2. Wyjąć gumową przelotkę, która zamyka otwór na przewody i
przełożyć wszystkie przewody połączeniowe do różnych urządzeń,
pozostawiając naddatek 20÷30cm od wyliczonej długości. Patrz
tabela 5 dla rodzaju przewodu i rys. 2 dla podłączeń.
3. Za pomocą opaski zaciskowej związać wszystkie przewody, które
wchodzą do siłownika, nieco poniżej otworu do wprowadzenia
przewodów. Na przelotce z gumy wyciąć otwór o średnicy mniejszej
od średnicy wiązki zebranych przewodów i założyć ją na przewody,
doprowadzając aż do opaski zaciskowej, a następnie umieścić
przelotkę w gnieździe otworu przelotowego przewodów. Założyć
drugą opaskę zaciskową ponad przelotką.
4. Podłączyć przewód zasilający do odpowiedniego zacisku, tak jak
pokazano na rys. 15, następnie, za pomocą opaski zaciskowej
unieruchomić przewód na najbliższym oczku w obudowie.
5. Wykonać podłączenia przewodów zgodnie ze schematem na rys.
17. Dla ułatwienia tej operacji zaciski są wyjmowane.
6. Po ukończeniu podłączeń należy unieruchomić przewody następną
opaską zaciskową na drugim uchwycie, a nadmiar przewodu
antenowego należy umocować z innymi przewodami za pomocą
opaski zaciskowej tak, jak pokazano na rys. 16.
!
3.4) Instalowanie innych urządzeń
Wykonać instalację innych, przewidzianych urządzeń, przestrzegając odpowiednich instrukcji. Sprawdzić w paragrafie „3.6 Opis połączeń elek-
trycznych” i na rys. 2, jakie urządzenia mogą być podłączone do siłownika ROBUS.
15
17
16
W celu podłączenia dwóch silników na przeciwległych skrzydłach patrz paragraf “7.3.5 ROBUS w trybie Slave”.
LUCYB
S.C.A.
MOFB MOSE
OPEN CLOSE

140
3.6) Opis połączeń elektrycznych
W tym paragrafie znajduje się krótki opis połączeń elektrycznych;
dodatkowe informacje znajdują się w paragrafie ”7.3 Dodawanie lub
usuwanie urządzeń”.
FLASH: wyjście do jednej lub dwóch lamp ostrzegawczych typu
“LUCYB” lub innych z jedną żarówką 12V o mocy maksymalnie 21W.
S.C.A.: wyjście “Kontrolka Otwarcia Bramy”; można tu podłączyć
lampkę sygnalizacyjną 24V o mocy maksymalnie 4W. Może ono także
zostać zaprogramowane do innych funkcji, patrz paragraf “7.2.3
Funkcje drugiego poziomu”.
BLUEBUS: do tego zacisku można podłączyć kompatybilne
urządzenia; wszystkie są łączone równolegle tylko dwoma
przewodami, którymi są zasilane, i którymi wysyłają sygnały do centrali.
Inne informacje dotyczące BlueBUS znajdują się w paragrafie „7.3.1
BlueBUS”.
STOP: wejście dla urządzeń, które blokują możliwość ruchu lub
ewentualnie zatrzymują wykonywany manewr; za pomocą
odpowiednich sposobów do tego wejścia można podłączyć styki typu
“Normalnie Zamknięty”, “Normalnie Otwarty” lub urządzenia o stałej
oporności Dodatkowe informacje dotyczące STOP znajdują się w
paragrafie „7.3.2 Wejście STOP”
P. P.: wejście dla urządzeń, które sterują ruchem; w trybie Krok po
Kroku można podłączyć tu styki typu “Normalnie Otwarty”
OPEN: wejście dla urządzeń, które sterują ruchem samego otwierania,
można podłączyć tu styki typu “Normalnie Otwarty”.
CLOSE: wejście dla urządzeń, które sterują ruchem samego
zamykania; można podłączyć tu styki typu “Normalnie Otwarty”.
ANTENA: wejście podłączenia anteny dla odbiornika radiowego
(antena jest wbudowana w lampę LUCY B).
Przed rozpoczęciem fazy kontroli i rozruchu automatyki zaleca się ustawienie skrzydła w połowie drogi tak, aby mogło się swobodnie poruszać w
kierunku otwarcia jak i zamknięcia.
4) Końcowe kontrole i uruchomienie
4.1) Wybór kierunku
W zależności od położenia siłownika w stosunku do skrzydła bramy
niezbędne jest wybranie kierunku manewru otwarcia; jeśli dla otwarcia
skrzydło ma się przesuwać w lewo, to należy przestawić przełącznik w
lewo, tak jak na rys. 18, jeśli otwarcie skrzydła ma odbywać się w
prawo, to należy przestawić przełącznik w prawo, tak jak na rys. 19.
18
19
4.2) Podłączenie zasilania
Podłączenie zasilania do siłownika ROBUS musi być
wykonane przez fachowy, wykwalifikowany personel,
posiadający niezbędne narzędzia i w pełnym poszanowaniu
przepisów, norm i uregulowań prawnych.
Natychmiast po doprowadzeniu napięcia do siłownika ROBUS zaleca
się wykonanie kilku prostych kontroli:
1. Sprawdzić, czy dioda sygnalizacyjna BLUEBUS pulsuje regularnie z
częstotliwością jednego błysku na sekundę.
2. Sprawdzić, czy pulsują również diody kontrolne na fotokomórkach
(na TX jak i na RX); nie jest ważny rodzaj pulsowania, gdyż jest to
zależne od innych czynników.
3. Sprawdzić, czy lampa ostrzegawcza podłączona do wyjścia FLASH
i dioda kontrolna podłączona do wyjścia S.C.A. nie świecą się.
Jeśli tak się nie dzieje należy natychmiast wyłączyć zasilanie centrali i
uważnie zweryfikować połączenia elektryczne.
Inne informacje, przydatne do wyszukiwania i diagnozowania
uszkodzeń są podane w rozdziale „7.6 Rozwiązywanie problemów”.
!
4.3) Rozpoznanie dołączonych urządzeń
Po podłączeniu zasilania należy doprowadzić do tego, aby centrala rozpoznała urządzenia podłączone do wejść BlueBUS i STOP. Przed tą fazą
diody kontrolne L1 i L2 pulsują wskazując, na konieczność dokonania rozpoznania dołączonych urządzeń.
Faza rozpoznania dołączonych urządzeń może być powtórzona w każdej innej chwili, również po zainstalowaniu dodatkowego urządzenia; w celu
wykonania nowego rozpoznania - patrz paragraf „7.3.6 Rozpoznawanie innych urządzeń”.
1. Wcisnąć i trzymać wciśnięte przyciski [▲] i [Set].
2. Zwolnić przyciski kiedy diody L1 i L2 zaczną bardzo szybko pulsować (po około 3 sekundach).
3. Odczekać kilka sekund aż centrala skończy rozpoznanie dołączonych urządzeń.
4. Po zakończeniu rozpoznania dioda STOP powinna pozostać zapalona, diody L1 i L2 zgasną (ewentualnie
zaczną pulsować diody L3 i L4).
20

141
PL
4.4) Rozpoznanie długości skrzydła
Po rozpoznaniu dołączonych urządzeń rozpoczną pulsowanie diody L3 i L4; oznacza to, że centrala musi określić długość skrzydła (odległość od
wyłącznika krańcowego zamknięcia do wyłącznika krańcowego otwarcia); ten wymiar jest niezbędny do wyliczenia momentu zwalniania i położenia
otwarcia częściowego.
Jeśli tak się nie dzieje należy natychmiast wyłączyć zasilanie centrali i dokładnie skontrolować połączenia elektryczne. Inne potrzebne informacje
znajdują się w rozdziale „7.6 Rozwiązywanie problemów”.
1. Wcisnąć i trzymać wciśnięte przyciski [▼] i [Set].
2. Zwolnić przyciski, kiedy rozpocznie się manewr (po około 3 sekundach).
3. Sprawdzić, czy wykonywanym manewrem jest otwarcie, w przeciwnym przypadku wcisnąć przycisk
[Stop] i sprawdzić z większą uwagą paragraf „4.1 Wybór kierunku”, następnie powtórzyć od punktu 1.
4. Odczekać, aż centrala ukończy manewr otwarcia aż do osiągnięcia wyłącznika krańcowego otwarcia;
zaraz potem rozpoczyna się manewr zamknięcia.
5. Odczekać aż centrala zakończy manewr zamykania.
4.5) Kontrola ruchu bramy
Po rozpoznaniu długości skrzydła zaleca się wykonanie kilku
manewrów, aby sprawdzić prawidłowość ruchu bramy.
1. Wcisnąć przycisk [Open], aby wykonać manewr “Otwarcie”;
sprawdzić, czy otwieranie bramy przebiega bez zmiany prędkości;
jedynie kiedy skrzydło znajduje się w pomiędzy 70 a 50cm od
wyłącznika krańcowego otwarcia musi zwolnić i zatrzymać się po
zadziałaniu wyłącznika krańcowego, w odległości 2÷3cm od
mechanicznego ogranicznika otwarcia.
2. Wcisnąć przycisk [Close], aby wykonać manewr “Zamknięcie”;
sprawdzić czy zamykanie bramy przebiega bez zmiany prędkości;
jedynie kiedy skrzydło znajduje się pomiędzy 70 i 50cm od
wyłącznika krańcowego zamknięcia musi zwolnić i zatrzymać się po
zadziałaniu wyłącznika krańcowego, w odległości 2÷3cm od
mechanicznego ogranicznika zamknięcia.
3. Podczas manewru sprawdzić czy lampa ostrzegawcza pulsuje w
cyklach: 0,5 sekundy zapalona i 0,5 sekundy zgaszona. Jeśli
znajduje się na wyposażeniu, sprawdzić również pulsowanie
kontrolki podłączonej do zacisku SCA: pulsowanie powolne przy
otwieraniu i szybkie przy zamykaniu.
4. Wykonać kilka manewrów otwierania i zamykania w celu
wychwycenia ewentualnych usterek montażu i regulacji lub innych
anomalii na przykład punktów zwiększonego tarcia.
5. Sprawdzić, czy mocowanie siłownika ROBUS, listwy zębatej i
zderzaków wyłączników krańcowych jest pewne, stabilne i
odpowiednio wytrzymałe również podczas silnych przyspieszeń lub
zwolnień ruchu bramy.
4.6) Funkcje fabrycznie ustawione
Centrala siłownika ROBUS posiada wiele funkcji z możliwością
ustawienia. Fabrycznie te funkcje są ustawione w takiej konfiguracji,
jaka powinna zadowolić większość użytkowników.
Funkcje te mogą być w każdej chwili zmienione dzięki odpowiedniej
procedurze programowania. W tym celu patrz paragraf ”7.2
Programowanie”.
21
4.7) Odbiornik radiowy
Do zdalnego sterowania siłownika ROBUS w centrali kontrolnej zamontowane jest złącze SM przeznaczone dla odbiorników radiowych typu SMXI
lub SMXIS, opcjonalnych. Dodatkowe informacje zawarte są w podręczniku użytkownika odbiornika radiowego. W celu podłączenia odbiornika
radiowego należy wykonać czynności wskazane na rys. 22. W tabeli 6 opisana jest zależność pomiędzy wyjściem odbiornika radiowego a
czynnością, jaką wykona ROBUS:
22
wyjście nr 1 Polecenie “P.P.” ( Krok po kroku)
wyjście nr 2 Polecenie “Otwarcie częściowe”
wyjście nr 3 Polecenie “Otwiera”
wyjście nr 4 Polecenie “Zamyka”
Tabela 6: funkcje wyjść odbiornika
Jest to najważniejsza faza wykonania automatyzacji, która ma na celu
zapewnienie maksymalnego bezpieczeństwa. Próby odbiorcze mogą
służyć również jako okresowa kontrola urządzeń, które składają się na
automatykę.
Próby odbiorcze całego urządzenia muszą być
przeprowadzone przez doświadczony i wykwalifikowany
personel, który musi wykonać obowiązujące próby, zgodnie z
istniejącymi zagrożeniami i z pełnym przestrzeganiem tego,
co przewiduje prawo, normatywy i uregulowania, a w
szczególności zgodnie z wszystkimi warunkami normy EN
12445, która ustala metody prób do kontroli automatyki dla
bram.
!
5) Odbiór i przekazanie do eksploatacji

142
5.1) Próby odbiorcze
Każdy element automatyki, na przykład listwy, fotokomórki, obwód
zatrzymania awaryjnego itp., wymagają specyficznej fazy odbioru; dla
tych urządzeń będzie trzeba wykonać procedury podane w
odpowiednich dla nich instrukcjach.
Podczas wykonywania prób odbiorczych siłownika ROBUS należy
wykonać następującą sekwencję czynności:
1. Sprawdzić, czy były dokładnie przestrzegane wskazówki tego
podręcznika, a w szczególności te z rozdziału „1 Ostrzeżenia”;;
2. Odblokować siłownik w sposób podany w paragrafie
“Wysprzęglanie i ruch ręczny” w rozdziale “Instrukcje i ostrzeżenia
przeznaczone dla użytkownika siłownika ROBUS”.
3. Sprawdzić, czy można ręcznie poruszyć bramę przy zamykaniu i
otwieraniu z siłą nie większą niż 390N (około 40 kg).
4. Blokowanie siłownika
5. Wykorzystując przewidziane urządzenia sterowania lub zatrzymania
(wyłącznik na klucz, przyciski sterowania lub nadajniki radiowe),
wykonać próby otwarcia, zamknięcia i zatrzymania bramy i
sprawdzić czy jej zachowanie odpowiada temu, jak powinna
reagować.
6. Zweryfikować po kolei właściwe funkcjonowanie wszystkich
urządzeń zabezpieczających znajdujących się w instalacji
(fotokomórki, listwy, itd.), a także upewnić się, że brama zachowuje
się zgodnie w sposób przewidywalny. W szczególności, za każdym
razem, kiedy zadziała któreś urządzenie, dioda “BlueBUS”,
znajdująca się na centrali, wykonuje 2 szybkie mignięcia jako
potwierdzenie rozpoznania zdarzenia.
7. Jeśli niebezpieczne sytuacje wywołane ruchem skrzydła zostały
zlikwidowane poprzez zmniejszenie siły uderzenia, należy wykonać
pomiar siły według tego, co przewidziano w normie EN 12445. Jeśli
regulacja “Prędkość” i kontrola “Siły silnika” są użyte jako pomoc w
systemie zmniejszenia siły uderzenia, należy próbować i znaleźć
taką regulację, która da najlepszy wynik.
5.2) Przekazanie do eksploatacji
Przekazanie do eksploatacji może nastąpić tylko po wykonaniu z
wynikiem pozytywnym wszystkich prób odbiorczych ROBUS oraz
innych zabudowanych urządzeń. Zabronione jest częściowe
uruchomienie w trybie „tymczasowym”.
1. Przez co najmniej 10 lat trzeba przechowywać dokumentację
techniczną automatyki, która powinna zawierać: rysunek złożeniowy
instalacji, schemat połączeń elektrycznych, analizę zagrożeń wraz z
odpowiednimi, zastosowanymi rozwiązaniami, deklaracją zgodności
producenta wszystkich użytych urządzeń (dla ROBUS użyć
załączoną Deklarację zgodności CE); kopie instrukcji użytkowania i
harmonogram konserwacji automatyki.
2. Na bramie należy zamocować tabliczkę zawierającą przynajmniej
następujące dane rodzaj automatu, nazwę i adres producenta
(osoby odpowiedzialnej za przekazanie do eksploatacji), numer
urządzenia, rok produkcji i oznaczenie “CE”.
3. Zamocować w pewny sposób w pobliżu bramy etykietkę lub
tabliczkę z opisem operacji do odblokowania i ręcznego otwierania.
4. Opracować i przekazać właścicielowi deklarację zgodności
automatyki.
5. Opracować i przekazać właścicielowi podręcznik z “Instrukcją i
ostrzeżeniami do używania automatyki”.
6. Opracować i przekazać właścicielowi harmonogram konserwacji
automatyki, (który musi zawierać wszystkie opisy dotyczące
konserwacji pojedynczych urządzeń).
7. Przed przekazaniem automatyki do pracy poinformować w
odpowiedni sposób na piśmie właściciela (na przykład na
podręczniku z instrukcjami i ostrzeżeniami do używania
automatyzacji) o występujących nadal niebezpieczeństwach i
zagrożeniach związanych z pracą urządzenia.
W tym rozdziale podane są informacje niezbędne do wykonania harmonogramu konserwacji i likwidacji ROBUS.
6) Konserwacja i likwidacja
6.1) Konserwacja
W celu utrzymywania stałego poziomu bezpieczeństwa oraz w celu
zagwarantowania maksymalnej trwałości całości automatu niezbędna
jest regularna konserwacja; w tym celu ROBUS wyposażony jest w
stycznik manewrowy oraz system sygnalizacji żądania konserwacji,
patrz paragraf „7.4.3 Wezwanie do konserwacji”.
Czynności konserwacyjne należy wykonać ściśle
przestrzegając norm bezpieczeństwa umieszczonych w
niniejszej instrukcji według prawa i norm aktualnie
obowiązujących.
Dla innych urządzeń, innych niż ROBUS należy przestrzegać
odpowiednich dla nich harmonogramów konserwacji.
1. Dla ROBUS konieczna jest planowa konserwacja w ciągu najdalej 6
miesięcy lub maksymalnie lub co 20.000 cykli pracy od poprzedniej
konserwacji.
2. Odłączyć wszelkie źródła zasilania elektrycznego, w tym ewentualne
akumulatory awaryjne.
3. Sprawdzić i ocenić stan zużycia wszystkich podzespołów, które
składają się na automatykę ze szczególnym uwzględnieniem
zjawiska korozji lub oksydacji elementów konstrukcyjnych; wymienić
elementy, które nie dają wystarczających gwarancji.
4. Sprawdzić stan zużycia elementów ruchomych: koła zębatego, listwy
zębatej i wszystkich elementów skrzydła, wymienić części zużyte.
5. Ponownie podłączyć źródła zasilania elektrycznego i wykonać próby
i kontrole przewidziane w paragrafie ”5.1 Próby odbiorcze”.
!
6.2) Likwidacja
ROBUS składa się z materiałów różnego rodzaju, niektóre z nich mogą
zostać ponownie użyte: stal, aluminium, plastik, przewody elektryczne, inne
materiały powinny zostać utylizowane: baterie i obwody elektroniczne.
Niektóre elementy elektroniczne i akumulatory mogą
zawierać substancje trujące, nie wolno ich porzucać w
przypadkowych miejscach. Zapoznać się ze sposobami
recyklingu lub utylizacji i dostosować się do aktualnie
obowiązujących w tym zakresie norm lokalnych.
1. Odłączyć zasilanie elektryczne od automatyki, łącznie z
ewentualnym dodatkowym akumulatorem awaryjnym.
2. Poodkręcać wszystkie urządzenia i akcesoria w kolejności
odwrotnej do podanej w rozdziale 3 ”Instalowanie”.
3. Oddzielić, o ile to możliwe, części, które mogą bądź muszą być
poddane recyklingowi lub likwidacji w inny sposób, na przykład
elementy metalowe, od elementów z tworzyw sztucznych, obwody
elektroniczne, akumulatory, itp.
4.
Rozdzielić i przekazać różne, posortowane w ten sposób materiały do
lokalnych punktów zajmujących się odzyskiwaniem materiałów wtórnych.
!

143
PL
W tym rozdziale są opisane możliwości programowania, personalizacji, diagnostyki i odszukiwania usterek w siłowniku ROBUS.
7) Rozszerzenie wiadomości
Open Przycisk “OPEN” pozwala na sterowanie otwarciem bramy albo przesuwa w
▲ górę punkt programowania.
Stop Przycisk “CLOSE“ pozwala na sterowanie zamknięciem bramy lub
Set przesuwa w dół punkt programowania.
Close Przycisk “CLOSE“ pozwala na sterowanie zamknięciem bramy lub
▼ przesuwa w dół punkt programowania.
7.1) Przyciski do programowania
Na centrali ROBUS znajdują się 3 przyciski, które mogą być użyte tak
do sterowania centrali podczas prób jak i do programowania:
23
7.2) Programowanie
W centrali siłownika ROBUS są do dyspozycji funkcje, które można
programować; regulacja funkcji następuje za pomocą 3 przycisków
znajdujących się na centrali [▲] [Set] [▼] i jest uwidoczniona za
pomocą 8 diod L1….L8.
Funkcje programowalne, które są do dyspozycji w siłowniku ROBUS
rozmieszczone są na 2 poziomach:
Poziom pierwszy funkcje regulowane w trybie ON-OFF (aktywna lub
nieaktywna); w tym przypadku każda z diod L1...L8 wskazuje jedną z
funkcji, jeśli się świeci to funkcja jest aktywna, jeśli jest zgaszona to
funkcja nie jest aktywna; patrz tabela 7.
Poziom drugi: parametry, które można regulować na skali wartości
(wartości od 1 do 8); w tym przypadku każda z diod: L1...L8 wskazuje
wartość wybraną spośród 8 możliwości; patrz tabela 9.
Dioda Funkcja Opis
L1 Zamknięcie automatyczne Ta funkcja pozwala na automatyczne zamknięcie bramy po zaprogramowanym czasie przerwy, fabryczny
czas przerwy jest ustawiony na 30 sekund, ale może być on zmieniony na 5, 15, 30, 45, 60, 80, 120 i 180 sekund.
Jeśli funkcja nie jest uaktywniona, to działanie jest “półautomatyczne”.
L2 Zamknij po Foto Ta funkcja pozwala na utrzymywaniu bramy otwartej przez czas niezbędny do przejścia przez nią, bowiem
zawsze działanie fotokomórki „Foto” wywołuje automatyczne zamknięcie z czasem zwłoki 5 sekund
(niezależnie od zaprogramowanej wartości). Sytuacja ta zmienia się w zależności od tego, czy jest aktywna,
lub nie, funkcja „Automatycznego Zamknięcia”.
Przy “Zamknięciu Automatycznym” nieaktywnym: Brama osiąga zawsze położenia całkowitego
otwarcia (także jeśli zadziałanie fotokomórki ma miejsce wcześniej). Po wyłączeniu fotokomórki wywołuje się
zamknięcie automatyczne ze zwłoką 5 sekundową.
Przy “Zamknięciu Automatycznym” aktywnym: czynność zamykania następuje niezwłocznie po
zwolnieniu linii Foto i wywoływane jest automatyczne zamknięcie ze zwłoką 5 sekundową.
Funkcja “Zamknij po Foto” jest zawsze wyłączana podczas manewrów przerwanych poleceniem Stop.
Jeśli funkcja “Zamknij po Foto” nie jest aktywna, czas zwłoki będzie taki jak zaprogramowany, albo nie
nastąpi automatyczne zamknięcie, jeśli funkcja nie jest aktywna.
L3 Zawsze Zamyka Funkcja “Zawsze Zamyka” działa skutkując zamknięciem, w sytuacji, gdy po przywróceniu zasilania brama
okazuje się otwarta. Z przyczyn bezpieczeństwa manewr poprzedzany jest 5 sekundowym pulsowaniem
światła. Jeśli funkcja nie jest aktywna, po przywróceniu zasilania brama pozostaje bez ruchu.
L4 Stand - By Ta funkcja pozwala na maksymalne zmniejszenie zużycia energii i jest szczególnie przydatna, jeśli siłownik
działa z akumulatorem awaryjnym. Jeśli ta funkcja jest włączona, to po 1 minucie od ukończenia manewru,
centrala wyłącza wyjście BlueBUS (a więc i urządzenia tam podłączone) i wszystkie diody kontrolne, za
wyjątkiem lampek kontrolnych BlueBUS, które będą powoli pulsować. Gdy centrala otrzymuje polecenie
przywraca pełne funkcjonowanie. Jeśli funkcja nie jest aktywna nie będzie ograniczenia zużycia prądu.
L5 Moment startowy Włączając tą funkcję, wyłączamy stopniowe przyśpieszenie przy rozpoczynaniu każdego z manewrów, co
pozwala na uzyskanie maksymalnego momentu startu i jest korzystne w sytuacjach występowania dużego
tarcia statycznego, na przykład w przypadku śniegu lub lodu blokujących skrzydło bramy. Jeśli moment
startowy nie jest aktywny manewr rozpoczyna się od stopniowego przyśpieszenia.
L6 Wstępne pulsowanie Dzięki funkcji wstępnego pulsowania lampy dodana została zwłoka 3 sekundowa pomiędzy rozpoczęciem
pulsowania a rozpoczęciem manewru w celu wcześniejszego uprzedzenia o niebezpieczeństwie. Jeśli
wstępne pulsowanie nie jest aktywne, włączenie pulsowania następuje równocześnie z rozpoczęciem manewru.
L7 “Zamyka” zmienia się na Aktywując tę funkcję wszystkie polecenia “zamknij” (wejście „CLOSE” lub polecenie radiowe „zamknij”)
“Otwiera Częściowo” uruchamiają manewr otwarcia częściowego (patrz dioda L6 w tabeli 9).
L8 Tryb “Slave” (“sługa”) Po uruchomieniu tej funkcji ROBUS staje się “Slave” (sługą). W ten sposób możliwe jest synchronizowanie
działania 2 silników na przeciwległych skrzydłach, w którym jeden z silników pełni role Master, a drugi Slave.
Dokładniejsze informacje zawarte są w paragrafie "7.3.5 ROBUS w trybie Slave".
Podczas normalnej pracy siłownika ROBUS diody kontrolne L1...L8 są zapalone lub zgaszone zgodnie ze stanem funkcji, jaką reprezentują,
na przykład L1 pali się jeśli jest włączone ”Zamykanie automatyczne”
Tabela 7: wykaz programowalnych funkcji: poziom pierwszy.
7.2.1) Funkcje pierwszego poziomu (funkcje ON-OFF)

144
Czas Przerwy
Funkcja P.P.
Prędkość
silnika
Wyjście
S.C.A.
Siła silnika
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
5 sekund
15 sekund
30 sekund
45 sekund
60 sekund
80 sekund
120 sekund
180 sekund
Otwiera-stop-zamyka-stop
Otwiera-stop-zamyka-otwiera
Otwiera–zamyka-otwiera-zamyka
Funkcja zespołu mieszkalnego
Zespół mieszkalny 2 (ponad 2” zatrzymuje)
Krok po Kroku 2 (mniej niż 2” otwiera częściowo)
Obecność człowieka
Otwarcie w trybie ”półautomatycznym”,
zamknięcie w trybie “obecność człowieka”.
Bardzo Wolno
Powolna
Średnia
Szybka
Bardzo szybko
Najszybciej
Otwiera ”szybko; zamyka „powoli”
Otwiera „najszybciej” Zamyka „szybko”
Funkcja “Kontrolka Otwartej Bramy”
Aktywne, jeśli skrzydło zamknięte
Aktywne, jeśli skrzydło otwarte
Aktywne z wyjściem radiowym nr 2
Aktywne z wyjściem radiowym nr 3
Aktywne z wyjściem radiowym nr 4
Kontrolka konserwacji
Zamek elektryczny
Brama najlżejsza
Brama bardzo lekka
Brama lekka
Brama średnia
Brama średnio-ciężka
Brama ciężka
Brama bardzo ciężka
Brama najcięższa
7.2.2) Programowanie pierwszego poziomu (funkcje ON-OFF)
Fabrycznie funkcje pierwszego poziomu są wszystkie ustawione na „OFF”, ale mogą być zmienione w każdym momencie - patrz tabela 8. Należy
pamiętać podczas wykonywania procedury, że maksymalny czas od wciśnięcia jednego przycisku do wciśnięcia następnego wynosi 10s, w
przeciwnym razie procedura zostaje zakończona automatycznie, zapamiętując zmiany wykonane do tego momentu.
1. Wcisnąć i trzymać wciśnięty przycisk [Set] przez około 3 sekundy
3s
2. Zwolnić przycisk [Set], kiedy dioda kontrolna L1 zacznie pulsować.
L1
3. Wcisnąć przyciski [▲] lub [▼], aby zamienić położenie pulsującej diody oznaczającej modyfikowaną
funkcję. lub
4. Nacisnąć krótko przycisk [Set], aby zmienić stan funkcji (pulsowanie krótkie = OFF; pulsowanie długie = ON.
5. Odczekać 10 sekund, aby wyjść z programowania kończąc maksymalny czas.
10s
Uwaga: punkty 3 i 4 mogą być powtórzone podczas tej samej fazy programowania w celu wprowadzenia ON lub OFF dla innych funkcji.
Tabela 8: aby zmienić funkcje ON-OFF Przykład
SET
SET
SET
7.2.3) Funzioni secondo livello (parametri regolabili)
Tabela 9: wykaz programowalnych funkcji: poziom drug
Dioda wejścia Parametr
Dioda (poziom)
wartość Opis
Reguluje czas przerwy, to znaczy czas
między otwarciem a zamknięciem
automatycznym. Działa jedynie jeśli
zamykanie automatyczne jest włączone.
Reguluje sekwencję poleceń związanych z
wejściem Krok po Kroku lub 1go kanału
radiowego.
Reguluje prędkość silnika podczas ruchu
zasadniczego.
Reguluje funkcję związaną z wyjściem SCA
(niezależnie od tego jaka jest związana z nim
funkcja, gdy jest ono aktywne, dostarcza
napięcie 24V -30 + 50% o maksymalnej
mocy 4W).
Reguluje system kontroli siły silnika, aby
dostosować ją do ciężaru bramy. System
kontroli siły mierzy także temperaturę
otoczenia automatycznie zwiększając siłę w
przypadku temperatur szczególnie niskich.
L1
L2
L3
L4
L5

145
PL
Uwaga: “ “ przedstawia ustawienie fabryczne
Wszystkie parametry mogą być regulowane według uznania bez żadnych ograniczeń; jedynie regulacja „Siły Silnika” może wymagać szczególnej
uwagi:
• Nie zaleca się stosowania dużych wartości siły w celu skompensowania faktu, że skrzydło ma pewne, nadmierne opory ruchu; zbyt duża siła
może negatywnie wpłynąć na funkcjonowanie systemu zabezpieczeń lub uszkodzić skrzydło.
• Jeśli kontrola „Siła Silnika” jest stosowana jako pomoc dla zmniejszenia siły uderzenia, to po każdej regulacji należy powtórzyć pomiar siły, tak
jak przewidziano w normie EN 12445.
• Zużycie i warunki atmosferyczne wpływają na ruch bramy, okresowo należy powtórzyć kontrolę regulacji siły.
Otwiera
częściowo
Wezwanie do
konserwac
Wykaz
anomalii
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
0,5 mt
1 mt
1,5 mt
2 mt
2,5 mt
3 mt
3,4 mt
4 mt
Automatyczne (na podstawie trudności
manewrów).
1000
2000
4000
7000
10000
15000
20000
wynik 1-go manewru (ostatniego)
wynik 2-go manewru
wynik 3-go manewru
wynik 4-go manewru
wynik 5-go manewru
wynik 6-go manewru
wynik 7-go manewru
wynik 8-go manewru
Dioda wejścia Parametr
Dioda (poziom)
wartość Opis
Reguluje wymiar częściowego otwarcia.
Częściowe otwarcie można polecić 2-gim
kanałem radiowym lub poleceniem
„ZAMYKA”, jeśli funkcja „Zamyka” jest
zaprogramowana jako „Otwiera Częściowo”.
Reguluje ilość manewrów, po której
przekazuje sygnał żądania konserwacji
automatyki (patrz paragraf “7.4.3 Wezwanie
do konserwacji”).
Umożliwia skontrolowanie rodzaju anomalii,
jaka pojawiła się podczas ostatnich 8
manewrów (patrz paragraf 7.6.1 Wykaz
dotychczasowych anomalii”).
L6
L7
L8
7.2.4) Programowanie drugiego poziomu (parametry regulowane)
Fabrycznie parametry regulowane są ustawione tak, jak to zaznaczono w tabeli 9: “ “ ale mogą być zmienione w jakimkolwiek momencie,
zgodnie z tym co podano w tabeli nr 10. Należy pamiętać, że maksymalny czas od wciśnięcia jednego przycisku do wciśnięcia następnego wynosi
10 sekund, po jego przekroczeniu procedura zostaje zakończona automatycznie zapamiętując zmiany wykonane do tego momentu.
1. Wcisnąć i trzymać wciśnięty przycisk [Set] przez około 3 sekundy
3s
2. Zwolnić przycisk [Set], kiedy dioda kontrolna L1 zaczyna pulsować.
L1
3. Wciskać przyciski [▲] lub [▼], aby zamienić położenie pulsującej „diody wejściowej” odpowiadającej
zmienianemu parametrowi. lub
4. Wcisnąć i trzymać wciśnięty przycisk [Set]. Przycisk [Set] musi być wciśnięty podczas wszystkich kroków
5 oraz 6.
5. Odczekać około 3 sekundy, następnie zapali się dioda kontrolna przedstawiająca aktualny poziom
regulowanego parametru.
6. Wciskać przycisk [▲] lub [▼], aby zamienić położenie zapalonej diody oznaczającej wartość parametru.
lub
7. Zwolnić przycisk [Set]
8. Odczekać 10 sekund, aby wyjść z programowania kończąc maksymalny czas.
10s
Uwaga: punkty od 3 do 7 mogą być powtórzone podczas tej samej fazy programowania w celu regulacji większej ilości parametrów.
Tabela 10: aby zmienić nastawialne parametry Przykład
SET
SET
SET
SET

146
7.2.6) Przykład programowania drugiego poziomu (parametry regulowane)
Jako przykład jest podana sekwencja czynności w celu dokonania zmiany ustawienia fabrycznego parametrów i zwiększenia „Czas Przerwy” do
60 sekund (wejście na L1 i poziom na L5) i zmniejszenia „Siła Silnika” dla bram lekkich (wejście na L5 i poziom na L2).
1. Wcisnąć i trzymać wciśnięty przycisk [Set] przez około 3 sekundy
3s
2. Zwolnić przycisk [Set], kiedy dioda kontrolna L1 zaczyna pulsować
L1
3. Wcisnąć i trzymać wciśnięty przycisk [Set]. Przycisk [Set] musi być wciśnięty przez cały czas trwania
kroków 4 i 5.
4. Odczekać około 3 sekund aż zapali się dioda L3, która przedstawia aktualną wartość parametru
”Czas Przerwy”. L3 3s
5. Wcisnąć 2 razy przycisk [▼], aby przesunąć zapaloną diodę na L5, która przedstawia nową wartość
”Czas Przerwy”. L5
6. Zwolnić przycisk [Set].
7. Wcisnąć 4 razy przycisk [▼], aby przesunąć diodę pulsującą na pozycję diody L5.
L5
8. Wcisnąć i trzymać wciśnięty przycisk [Set]. Przycisk [Set] musi być wciśnięty przez cały czas trwania
kroków 9 i 10.
9. Odczekać około 3 sekundy aż zaświeci się dioda L5, która przedstawia aktualną wartość parametru
”Siła Silnika”. 3s L5
10. Wcisnąć 3 razy przycisk [▲], aby przesunąć świecąc się diodę na L2, która przedstawia nową wartość
”Siła Silnika”. L2
11. Zwolnić przycisk [Set].
12. Odczekać 10 sekund, aby wyjść z programowania wyczerpując maksymalny czas bezczynności.
10s
Tabela 12: przykład programowania drugiego poziomu Przykład:
SET
SET
SET
SET
SET
SET
7.3) Dodawanie lub usuwanie urządzeń
Przy automatyzacji z siłownikiem ROBUS istnieje możliwość dodawania
lub usuwania dodatkowych urządzeń w jakimkolwiek momencie. W
szczególności do „BlueBUS” i do wejścia „STOP” mogą być podłączone
różne rodzaje urządzeń, tak jak podano w następnych paragrafach.
Po dodaniu lub usunięciu urządzeń koniecznym jest
powtórzenie rozpoznania dodatkowych urządzeń w sposób
opisany w paragrafie ”7.3.6 Rozpoznawanie innych urządzeń”.
7.3.1) BlueBUS
BlueBUS jest technologią, która pozwala na wykonanie podłączeń
urządzeń kompatybilnych za pomocą jedynie dwóch przewodów,
którymi jest przesyłane zasilanie elektryczne jak i zwrotne sygnały
komunikatów. Wszystkie urządzenia są podłączane równolegle do tych
samych 2 przewodów BlueBUS i bez konieczności przestrzegania
biegunowości; każde urządzenie jest rozpoznawane pojedynczo,
ponieważ podczas instalowania jest mu przypisany jeden,
jednoznaczny adres.
Do BlueBUS można podłączyć na przykład: fotokomórki, urządzenia
bezpieczeństwa, przyciski sterowania, diody sygnalizacyjne itp. Centrala
kontrolna ROBUS rozpoznaje kolejno wszystkie urządzenia dołączone
podczas odpowiedniej fazy rozpoznawania i jest w stanie z wyjątkową
dokładnością wykryć wszelkie możliwe anomalie. Z tego powodu za
każdym razem, kiedy jest dodawane lub odłączane jakieś urządzenie
dołączone do BlueBUS, należy w centrali przeprowadzić fazę rozpoznania,
tak jak opisano w paragrafie „7.3.6 Rozpoznawanie innych urządzeń”.
7.2.5) Przykład programowania pierwszego poziomu (funkcje ON-OFF)
Jako przykład jest przywołana sekwencja czynności, potrzebna, aby zmienić ustawienie fabryczne funkcji -włączyć funkcje ”Zamykanie
Automatyczne” (L1) i ”Zawsze Zamyka” (L3).
1. Wcisnąć i trzymać wciśnięty przycisk [Set] przez około 3 sekundy
3s
2. Zwolnić przycisk [Set], kiedy dioda kontrolna L1 zacznie pulsować.
L1
3. Wcisnąć jeden raz krótko przycisk [Set], aby zmienić stan funkcji powiązanej z L1 (Zamknięcie Automatyczne),
teraz dioda kontrolna L1 pulsuje długimi zmianami. L1
4. Wcisnąć 2 razy przycisk [▼], aby przesunąć pulsowanie na diodę L3.
L3
5. Wcisnąć jeden raz krótko przycisk [Set], aby zmienić stan funkcji powiązanej z L3 (zawsze zamyka ), teraz
dioda kontrolna L3 pulsuje długimi zmianami. L3
6. Odczekać 10 sekund, aby wyjść z programowania wyczerpując maksymalny czas bezczynności.
10s
Po zakończeniu tych operacji diody L1 i L3 muszą pozostać zapalone wskazując, że są aktywowane funkcje ”Zamknięcie Automatyczne” i
”Zawsze Zamyka”.
Tabela 11: przykład programowania pierwszego poziomu Przykład
SET
SET
SET
SET

147
PL
7.3.2) Wejście STOP
STOP jest wejściem, które powoduje natychmiastowe zatrzymanie
manewru, a następnie następuje krótka zmiana kierunku. Do tego
wejścia mogą być podłączone urządzenia z wyjściem ze stykiem
normalnie otwartym ”NO”, normalnie zamkniętym ”NC”, albo urządzenia
z wyjściem o stałej oporności 8,2KΩ, jak na przykład listwy
rezystancyjne.Tak jak w przypadku BlueBUS, centrala rozpoznaje
rodzaj urządzenia dołączonego do wejścia STOP podczas fazy
rozpoznawania (patrz paragraf ”7.3.6 Rozpoznawanie innych
urządzeń”); każda zmiana w porównaniu do stanu zapamiętanego
powoduje polecenie ”STOP”).
Za pomocą odpowiednich sposobów istnieje możliwość podłączenia do
wejścia STOP więcej niż jednego urządzenia, nawet różnych rodzajów:
• Większą ilość urządzeń NO można podłączyć równolegle ze sobą
bez żadnego ograniczenia ilości.
• Więcej urządzeń NC można podłączyć szeregowo pomiędzy sobą
bez żadnego ograniczenia ilości.
• est ich więcej niż 2, to mogą być podłączone w „kaskadzie” z
jednym jedynie oporem 8,2KΩ na końcu.
• Możliwa jest kombinacja NO i NC poprzez równoległe połączenie
obu styków i dołączeniem szeregowo do styku NC - oporu 8,2KΩ
(pozwala to także na kombinację 3 urządzeń: NO, NC i 8,2KΩ).
Jeśli wejście STOP jest używane do podłączenia urządzeń
z funkcjami bezpieczeństwa, jedynie urządzenia ze stałym
oporem 8,2KΩ zapewniają 3-cią kategorię odporności na
usterki według normy EN 954-1.
!
FOTO
Fotokomórka zewnętrzna h = 50
z działaniem przy zamykaniu
FOTO II
Fotokomórka zewnętrzna h = 100
z działaniem przy zamykaniu
FOTO 1
Fotokomórka wewnętrzna h = 50
z działaniem przy zamykaniu
FOTO 1 II
Fotokomórka wewnętrzna h = 100
z działaniem przy zamykaniu
FOTO 2
Fotokomórka zewnętrzna z działaniem
przy otwieraniu
FOTO 2 II
Fotokomórka wewnętrzna z działaniem
przy otwieraniu
FOTO 3
Pojedyncza fotokomórka obejmująca całą
automatykę
Instalacja FOTO 3 razem z FOTO II wymaga przestrzegania
położenia fotokomórki TX i RX, zgodnie z ostrzeżeniem podanym w
instrukcji fotokomórek.
!
7.3.3) Fotokomórki
System ”BlueBUS” pozwala, poprzez adresowanie przy pomocy
odpowiednich mostków, na rozpoznanie fotokomórek przez centralę i
przydzielenie właściwej funkcji odczytu. Nadawanie adresu dotyczy TX
i RX (wykonujemy mostkowanie w taki sam sposób) po upewnieniu się,
czy przypadkiem inne pary fotokomórek nie posiadają tego samego
adresu.
W automatyce bram przesuwnych z siłownikiem ROBUS możliwe jest
zainstalowanie fotokomórek w sposób zaprezentowany na rys. 24.
Po zainstalowaniu lub usunięciu fotokomórek koniecznym będzie
dokonanie w centrali fazy rozpoznawania w sposób opisany w
paragrafie “7.3.6 Rozpoznawanie innych urządzeń”.
7.3.4) Czujnik fotooptyczny FT210B
Czujnik fotooptyczny FT210B łączy w jedno urządzenie system
ograniczania siły (typu C zgodnie z normą EN 12453) oraz czujnik
obecności wykrywający przeszkody znajdujące się w osi optycznej
pomiędzy nadajnikiem TX, a odbiornikiem RX (typ D zgodnie z normą
EN12453). W czujniku fotooptycznym FT210B sygnały stanu listwy
przesyłane są poprzez promień fotokomórki integrując w ten sposób
dwa systemy w jedno urządzenie. Część nadajnikowa znajdująca się w
ruchomym skrzydle zasilana jest akumulatorem eliminując w ten
sposób nieestetyczne systemy połączeń; specjalne obwody natomiast
ograniczają zużycie akumulatora gwarantując jego trwałość przez okres
15 lat (patrz szczegóły dotyczące szacowania trwałości w instrukcji
obsługi produktu).
Jedno tylko urządzenie FT210B powiązane z czujnikiem listwy (na
przykład TCB65) pozwala na osiągnięcie poziomu bezpieczeństwa
„listwy głównej” wymaganego przez normę EN 12453 niezależnie od
„sposobu użytkowania” i „sposobu uruchamiania”.
Czujnik fotooptyczny FT210B połączony z listwami “opornościowymi”
(8,2KΩ) jest zabezpieczeniem przed pojedynczym uszkodzeniem
(kategoria 3 według normy EN 954-1). Posiada specjalny obwód
antykolizyjny, który pozwala uniknąć zakłóceń z innych czujników, także
niezsynchronizowanych i pozwala na dodanie innych czujników
fotooptycznych, na przykład w przypadku przejazdu dla ciężkich
pojazdów, gdzie zazwyczaj instaluje się drugą fotokomórkę na
wysokości 1m od ziemi.
Dodatkowe informacje na temat warunków podłączania i adresowania
zawarte są w podręczniku użytkownika FT210B.
24
Tabela 13: adresy fotokomórek
Fotokomórka Mostki Fotokomórka Mostki

148
7.3.5) ROBUS w trybie „Slave”
Odpowiednio zaprogramowany i podłączony ROBUS może działać w
trybie “Slave” (sługa), ten tryb działania wykorzystywany jest w
przypadku potrzeby zautomatyzowania dwóch przeciwległych skrzydeł,
gdy zamiarem jest uzyskanie zsynchronizowanych ruchów obu
skrzydeł bramy. W tym trybie jeden ROBUS działa jako Master (pan), to
znaczy steruje manewrem, natomiast drugi ROBUS pracuje w trybie
Slave, to znaczy wykonuje polecenia wysyłane przez master (fabrycznie
wszystkie ROBUS zaprogramowane są jako Master).
W celu skonfigurowania ROBUS jako Slave należy uruchomić funkcję
pierwszego poziomu „Tryb Slave” (patrz tabela 7).
Połączenie pomiędzy ROBUS master a ROBUS Slave odbywa się za
pośrednictwem BlueBUS.
W tym przypadku należy zachować biegunowość połączeń
między obydwoma ROBUS, jak to zilustrowano na rysunku 26
(pozostałe urządzenia nie muszą mieć zachowanej
biegunowości).
W celu zainstalowania dwóch ROBUS w trybie Master i Slave należy
wykonać następujące czynności:
• Wykonać połączenie obydwu silników w sposób zilustrowany na
rysunku 25. Jest obojętne, który z silników funkcjonował będzie jako
master, a który jako Slave, wybierając należy uwzględnić wygodę
połączeń oraz fakt, że polecenie Krok po kroku w Slave zezwala na
całkowite otwarcie jedynie skrzydła napędzanego Slave.
• Połączyć dwa silniki jak na rysunku 26.
• Wybrać kierunek manewru otwarcia obydwu silników, jak to
wskazano na rysunku 25 (patrz także paragraf “4.1 Wybór kierunku”).
• Podłączyć zasilanie obu silników.
• W ROBUS Slave zaprogramować funkcję “tryb Slave” (patrz tabela
7).
• Wykonać rozpoznanie urządzeń podłączonych do ROBUS Slave
(patrz paragraf “4.3 Rozpoznawanie dołączonych urządzeń”).
• Wykonać rozpoznanie urządzeń podłączonych do ROBUS master
(patrz paragraf “4.3 Rozpoznawanie dołączonych urządzeń”)
• Dokonać pomiaru długości skrzydeł bramy przez ROBUS Master
(patrz paragraf “4.4 Rozpoznanie długości skrzydła”).”).
!
25
26
W połączeniu obu ROBUS w trybie Master - Slave zwrócić uwagę aby:
• Wszystkie urządzenia były podłączone do ROBUS Master (jak na rysunku 26) w tym także odbiornik radiowy.
• W przypadku użycia akumulatora awaryjnego oba silniki mają posiadać własne akumulatory.
• Wszystkie programy z ROBUS Slave były ignorowane (przeważają te z ROBUS Master), za wyjątkiem tych, które wskazano w tabeli 14.
LUCYB
S.C.A.
MOFB
MOSE
OPEN
CLOSE
LUCYB
S.C.A.
STOP
PP

149
PL
7.4.1) Funkcja “Otwiera zawsze”
Funkcja „Otwiera zawsze” jest ciekawą możliwością centrali sterującej,
która pozwala zawsze na wykonanie manewru otwarcia, kiedy
sterowanie „Krok po kroku” trwa dłużej niż 2 sekundy; jest to przydatne,
na przykład, aby podłączyć do zacisku P.P. Krok po kroku styki zegara
programującego tak, aby brama była stale otwarta o pewnej porze dnia.
Ta funkcja jest aktywna bez względu na sposób zaprogramowania
wejścia P.P, za wyjątkiem funkcji „Zamyka”, patrz parametr „Funkcja Krok
po kroku” w tabeli 9.
7.4.2) Funkcja “Owórz awaryjnie”
W przypadku, kiedy urządzenie bezpieczeństwa nie działa prawidłowo
lub nie działa w ogóle, istnieje możliwość sterowania i przesuwania
bramy w trybie „ręcznym”.
Szczegóły są podane w paragrafie „Sterowanie z zabezpieczeniami
niedziałającymi”, znajdującym się w załączniku „Instrukcje i ostrzeżenia
przeznaczone dla użytkownika siłownika ROBUS”.
7.4.3) Wezwanie do konserwacji
ROBUS pozwana na przypomnienie użytkownikowi, kiedy należy
dokonać kontroli konserwacyjnej automatyki. Ilość manewrów, po
której następuje wezwanie podzielona jest na 8 poziomów za pomocą
zmiennego parametru „Wezwanie do konserwacji” (patrz tabela 9).
Poziom 1 regulacji jest “automatyczny” i bierze pod uwagę ciężkość
manewrów, to znaczy siłę i czas trwania manewru, natomiast pozostałe
regulacje określane zostają na podstawie ilości manewrów.
Sygnalizacja potrzeby konserwacji następuje poprzez pulsowanie
lampy ostrzegawczej lub lampy podłączonej do wyjścia SCA, gdy jest
zaprogramowana jako „Kontrolka Konserwacji” (patrz tabela 9).
Na podstawie ilości wykonanych manewrów w stosunku do
zaprogramowanej granicy, pulsowanie lampy oraz kontrolki konserwacji
podają sygnały, o których w tabeli 16.
7.4) Funkcje specjalne
Tabela 14: Programy ROBUS Slave niezależne od ROBUS Master
Funkcje pierwszego poziomu (funkcje ON-OFF Funkcje drugiego poziomu (parametry programowalne)
Stand - By Prędkość silnika
Moment startowy Wyjście SCA
Tryb Slave Siła silnika
Wykaz błędów
Do Slave podłączyć można:
• własną lampę ostrzegawczą (Flash)
• własną kontrolkę otwartej bramy (SCA)
• własną listwę rezystancyjną(stop)
• własny pulpit sterowniczy (Krok po kroku) sterujący całkowitym otwarciem skrzydła Slave.
• W Slave wejścia Open i Close nie są używane.
7.3.6) Rozpoznawanie innych urządzeń
Zwykle operacja rozpoznawania urządzeń dołączonych do BlueBUS i do wejścia STOP jest wykonywana podczas instalacji systemu; jednak po
każdym dodaniu lub odjęciu urządzenia możliwe jest powtórzenie rozpoznawania w sposób podany w tabeli 15.
1. Wcisnąć i trzymać wciśnięte przyciski [▲] i [Set]
2. Zwolnić przyciski, kiedy diody L1 i L2 zaczną bardzo szybko pulsować (po około 3 sekundach).
L1 L2
3. Odczekać kilka sekund aż centrala skończy rozpoznanie urządzeń.
4. Po zakończeniu rozpoznania diody L1 i L2 przestaną pulsować, dioda STOP musi pozostać zapalona,
natomiast diody L1...L8 zapalą się zgodnie ze stanem funkcji ON-OFF, które obrazują. L1 L2
Po dodaniu lub usunięciu urządzeń jest niezbędne wykonanie ponownie odbioru automatyki zgodnie z tym, co podano w
paragrafie „5.1 Próby odbiorcze”.
!
Tabela 15: rozpoznanie innych urządzeń Przykład
SET
SET
Ilość manewrów Sygnalizacja Flash Sygnalizacja kontrolki konserwacji
Poniżej 80% limitu
Pomiędzy 81 a 100% limitu
Ponad 100% limitu
Normalna (0,5 z włączone, 0,5 s wyłączone)
Na początku manewru pozostaje włączone przez 2 s, a
następnie przechodzi do trybu normalnego.
Na początku manewru pozostaje włączone przez 2 s,
a następnie przechodzi do trybu normalnego.
Włączona przez 2 s na początku otwierania
Pulsuje przez cały czas trwania manewru
Pulsuje stale.
Tabela 16: wezwanie do konserwacji przy pomocy Flash i kontrolki konserwacji.

150
Kontrola ilości wykonanych manewrów
Przy pomocy funkcji “Wezwanie do konserwacji” możliwe jest ustalenie ilości manewrów wykonanych jako odsetek założonej granicy. W celu
dokonania tej kontroli należy postępować w sposób opisany w tabeli 17.
1. Wcisnąć i trzymać wciśnięty przycisk [Set] przez około 3 sekundy
3s
2. Zwolnić przycisk [Set], kiedy dioda kontrolna L1 zacznie pulsować.
L1
3. Wciskać przyciski [▲] lub [▼], aby zmienić położenie pulsującej ”diody wejściowej” na parametr ”wezwanie
do konserwacji” lub L7
4. Wcisnąć i trzymać wciśnięty przycisk [Set]. Przycisk [Set] musi być wciśnięty przez cały czas trwania
korków 5, 6 i 7.
5. Odczekać około 3 sekundy, następnie zapali się dioda kontrolna przedstawiająca aktualny poziom
parametru „Wezwanie do konserwacji” 3s
6. Wcisnąć i trzymać wciśnięte przyciski [▲] i [▼]
e
7. Dioda odpowiadająca wybranemu poziomowi kilkakrotnie zaświeci pulsując. Ilość impulsów światła oznacza
procentowy wskaźnik wykonanych manewrów (wielokrotność 10%) w stosunku do założonej granicy.
Na przykład: przy założonym żądaniu konserwacji na L6, to znaczy 10000, 10% odpowiada 1000 manewrów,
jeśli dioda sygnalizacyjna wykona 4 pulsowania oznacza to, że osiągniętych zostało 40% manewrów
(to znaczy ilość pomiędzy 4000 a 4999 manewrów). Jeśli nie zostało osiągniętych 10% założonych
manewrów, pulsowanie nie następuje.
8. Zwolnić przycisk [Set]
Tabela 17 kontrola ilości wykonanych manewrów Przykład
SET
SET
SET
SET
.... n=?
Zerowanie licznika manewrów
Po wykonaniu konserwacji urządzenia koniecznym jest wyzerowanie licznika manewrów.
Należy postępować w sposób opisany w tabeli 18.
1. Wcisnąć i trzymać wciśnięty przycisk [Set] przez około 3 sekundy
3s
2. Zwolnić przycisk [Set], kiedy dioda kontrolna L1 zacznie migać
L1
3. Wciskać przyciski [▲] lub [▼] , aby zmienić położenie pulsującej „diody wejściowej” na L7 - parametr
„Wezwanie do konserwacji”. lub L7
4. Wcisnąć i trzymać wciśnięty przycisk [Set]. Przycisk [Set] musi być wciśnięty przez cały czas trwania
kroków 5 i 6.
5. Odczekać około 3 sekundy, następnie zapali się dioda kontrolna przedstawiająca aktualny poziom
parametru „Wezwanie do konserwacji” 3s
6. Nacisnąć i trzymać wciśnięte przez przynajmniej 5 sekund przyciski [▲] i [▼], a następnie oba przyciski zwolnić.
Dioda odpowiadająca wybranemu poziomowi wykona całą serie szybkich pulsowań sygnalizując, ze licznik
manewrów został wyzerowany.
i
7. Zwolnić przycisk [Set]
Tabela 18: zerowanie licznika manewrów Przykład
SET
SET
SET
SET
7.5) Podłączenie innych urządzeń
Jeśli istnieje potrzeba zasilania urządzeń zewnętrznych jak na przykład
czytnik zbliżeniowy dla kart z transponderem albo światła
oświetlającego wyłącznik kluczowy, można w tym celu pobrać zasilanie
tak jak pokazano na rys. 27. Napięcie zasilania to 24Vps -30% ÷ +50%
przy maksymalnie dostępnym prądzie 100mA.
-+
24Vcc
27

151
PL
7.7) Diagnostyka i sygnalizacja
Niektóre urządzenia posiadają możliwość specjalnej sygnalizacji, za
pomocą której można łatwo określić stan działania lub ewentualne
działanie nieprawidłowe.
7.6) Rozwiązywanie problemów
W tabeli nr 19 można znaleźć przydatne wskazówki do rozwiązania
problemów, jakie mogą pojawić się w czasie instalowania lub w
przypadku uszkodzenia.
29
Tabela 19 wyszukiwanie usterek
Symptomy Zalecane kontrole
Nadajnik radiowy nie steruje bramą i dioda na nim
nie zapala się.
Nadajnik radiowy nie steruje bramą ale dioda na
nim zapala się.
Nie można wykonać żadnego manewru i dioda
„BlueBUS” nie pulsuje.
Nie można sterować żadnym manewrem i lampa
nie świeci się pulsująco.
Nie można sterować bramą a dioda wykonuje
kilka mignięć.
Manewr rozpoczyna się, lecz zaraz po tym
następuje cofnięcie bramy.
Manewr jest wykonywany w sposób prawidłowy,
ale nie działa lampa ostrzegawcza.
Manewr jest wykonywany w sposób prawidłowy,
ale nie działa kontrolka SCA.
Sprawdzić, czy baterie nadajnika nie wyczerpały się, ewentualnie je wymienić.
Sprawdzić czy nadajnik jest prawidłowo wczytany do odbiornika radiowego.
Sprawdzić, czy ROBUS jest zasilany napięciem z sieci. Sprawdzić, czy bezpieczniki nie są
przepalone; w takim przypadku należy ustalić przyczynę usterki, a następnie wymienić
bezpieczniki na nowe o takiej samej wartości prądu i pozostałych danych
Sprawdzić, czy polecenie jest rzeczywiście odbierane. Jeśli polecenie dochodzi do
wejścia Krok po kroku to odpowiednia dioda „PP” musi się zapalić; jeśli natomiast jest
użyty nadajnik radiowy, to dioda „BlueBUS” musi wykonać dwa szybkie mignięcia.
Policzyć ilość mignięć i sprawdzić zawartość wskazówek z tabeli 21.
Wybrana siła może być za mała dla tego rodzaju bramy. Sprawdzić czy nie ma przeszkód
i ewentualnie wybrać większą siłę.
Sprawdzić, czy podczas manewru jest napięcie na zacisku FLASH lampy ostrzegawczej,
(ponieważ jest to sygnał przerywany, wartość napięcia nie ma znaczenia: około 10-
30Vps); jeśli napięcie jest, to przyczyną będzie uszkodzona żarówka, którą należy
wymienić na inną o takich samych danych; jeśli brak napięcia, może być to przeciążenie
na wyjściu FLASH. sprawdzić, czy nie ma zwarcia na przewodach.
Sprawdzić rodzaj funkcji zaprogramowanej dla wyjścia SCA (tabela 9). W chwili, gdy
kontrolka powinna być włączona sprawdzić, czy jest napięcie na zacisku SCA (około 24
Vps): jeśli jest napięcie, to albo należy wymienić przepaloną diodę kontrolną na inną o
takich samych charakterystykach, jeśli brak napięcia, być może spowodowane jest to
przeciążeniem na wyjściu SCA. Sprawdzić, czy nie ma zwarcia w przewodzie.
F2
F1
1. Wcisnąć i trzymać wciśnięty przycisk [Set] przez około 3 sekundy
3s
2. Zwolnić przycisk [Set], kiedy dioda kontrolna L1 zacznie pulsować.
L1
3. Wciskać przyciski [▲] lub [▼]], aby zmienić położenie pulsującej „diody wejściowej” na parametr -
„Wykaz anomalii”. lub L8
4. Wcisnąć i trzymać wciśnięty przycisk [Set]. Przycisk [Set] musi być wciśnięty przez cały czas trwania
kroku 5 i 6.
5. Odczekać około 3 sek. a następnie zaświecą się diody odpowiadające manewrom, podczas których
pojawiły się anomalie. Dioda L1 wskazuje wynik ostatniego manewru, dioda L8 wskazuje wynik manewru
ósmego od końca. Jeśli dioda jest włączona, oznacza to, ze podczas manewru miały miejsce anomalie, jeśli
dioda jest zgaszona, oznacza to, ze manewr został wykonany bez wystąpienia żadnej anomalii.
6. Wcisnąć przyciski [▲] i [▼] w celu dokonania wyboru odpowiedniego manewru:
Odpowiednia dioda wykona ilość mignięć równą tej jaka normalnie pojawia się na sygnalizatorze po zaistnieniu
anomalii (patrz tabela 21). i
7. Zwolnić przycisk [Set].
Tabela 20 wykaz anomalii Przykład
SET
SET
SET
SET
7.6.1) Wykaz dotychczasowych anomalii
ROBUS umożliwia wyświetlenie ewentualnych anomalii, jakie pojawiły się w czasie ostatnich 8 manewrów, na przykład przerwanie manewru z
powodu zadziałania fotokomórki lub listwy. W celu dokonania kontroli listy anomalii należy postępować w sposób podany w tabeli 20.
3s
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
Strona się ładuje...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
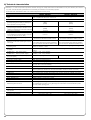 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
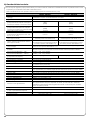 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
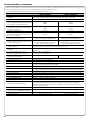 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
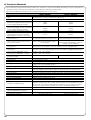 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
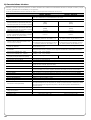 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
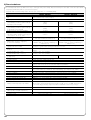 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
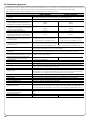 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
























































































































































































Nice Robus 1000 Instructions And Warnings
- Typ
- Instructions And Warnings
- Niniejsza instrukcja jest również odpowiednia dla
w innych językach
- español: Nice Robus 1000
- italiano: Nice Robus 1000
- Deutsch: Nice Robus 1000
- français: Nice Robus 1000
- English: Nice Robus 1000
- Nederlands: Nice Robus 1000
Powiązane artykuły
Inne dokumenty
-
Nice Automation Robus and Robuskit Instrukcja obsługi
-
-
-
-
-
-
-
-
-