AvMap - 19
Farmnavigator
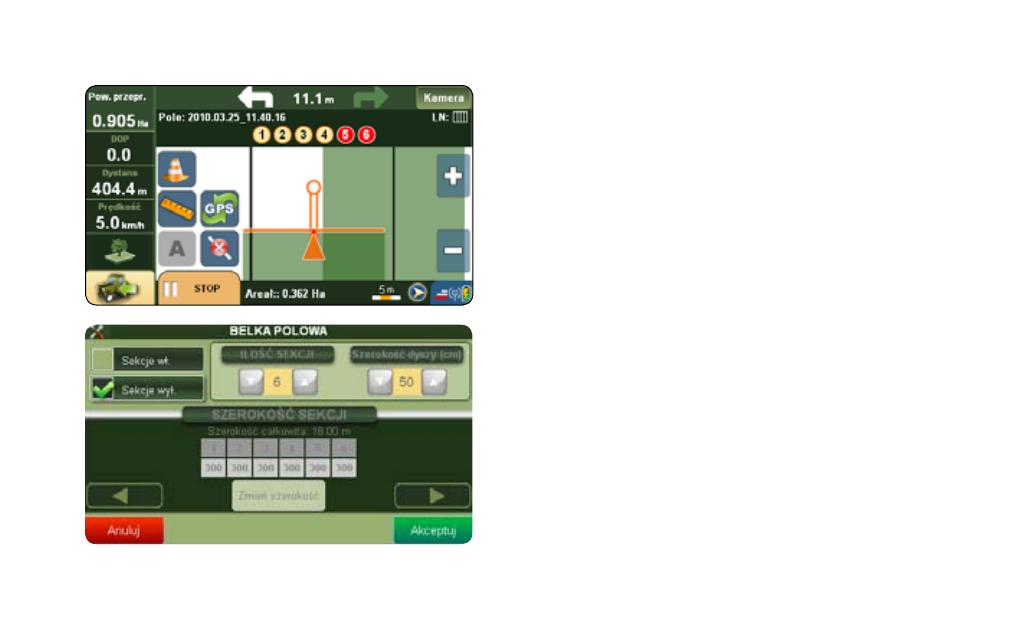
3.6 Panel sterujący
Po utworzeniu linii nawigacyjnych uaktywnia się panel
nawigacyjny nad kartą pola. Wskazuje on, poprzez
strzałki, o ile i w którą stronę należy korygować tor jazdy
pojazdu, aby poruszać się dokładnie wzdłuż wyznaczonych
linii nawigacyjnych. Między strzałkami pokazywana jest
wartość odchylenia (cm) od toru idealnego, odpowiednio
w prawo lub lewo. Na uwrociu wartość wskazuje nam
odległość do następnej ścieżki roboczej. Po lewej stronie
znajdują się cztery pola: przepracowana powierzchnia,
dystans(odległość przejechana po polu), prędkość
oraz wartość DOP. Informacje dotyczące wartości DOP
znajdują się w załączniku A.
Po zakończeniu pracy na polu należy wcisnąć STOP
na wyświetlaczu. Przepracowana powierzchnia
(podświetlona na zielono) zostaje zapisana w bazie
danych pola. Pole można w każdej chwili otworzyć i
kontynuować pracę, naciskając START.



















