
Wersja oprogramowania
2.5.xx
Nawigacja polowa
Instrukcja obsługi

Twoja podróż, nasza technologia
Szanowny Kliencie,
Gratulujemy wyboru produktu rmy AvMap.
AvMap produkuje wykonane w 100% w Europie nawigacje
satelitarne od 1994 roku.
Ta instrukcja obsługi dotyczy wersji oprogramowania
2.5.xx wydanego w lutym 2010 dla następujących
nawigacji satelitarnych:
G6 Farmnavigator
G6 Connect Farmnavigator

AvMap - 3
Spis treści
1. Wstęp 4
1.1 Zawartość zestawu 4
1.2 Opis urządzenia 4
1.3 Montaż 5
2. Farmnavigator – menu główne 7
2.1 Pola 8
2.2 Belka robocza 8
2.3 Ustawienia 9
2.3.1 Szerokość robocza 9
2.3.2 Belka polowa 10
2.3.3 Linie nawigacyjne 10
2.3.4 Przesunięcie 10
2.3.5 Jednostka 11
2.3.6 Min. prędkość 11
2.3.7 Ustawienia główne 11
2.4 Kamera 12
2.5 Głośność i jasność 12
2.6 Bluetooth 12
3. Ustawianie parametrów roboczych i praca na polu 13
3.1 Utworzenie pola 13
3.2 Praca na polu 13
3.4 Ustawianie przeszkód/miejsc pobierania próbek ziemi 15
3.5 Wybór trybu prowadzenia 15
3.5.1 Równolegle 16
3.5.2 Konturowo 17
3.5.3 Ścieżka 18
3.5.4 Po okręgu 18
3.6 Panel sterujący 19
3.7 Wirtualne sterowanie sekcjami roboczymi opryskiwacza 20
4. Baza danych pola 22
4.1 Edycja danych pola 22
4.2 Wysyłanie danych pola do programu Google Earth 24
4.3 Drukowanie obrazu pola w programie Google Earth 28
4.4 Pobieranie danych pola 28
Załącznik A: Wartość DOP 30

4 - AvMap
1. Wstęp
1.1 Zawartość zestawu
• G6 Farmnavigator / G6 Connect Farmnavigator
• Zasilacz 220 V
• Zasilacz samochodowy 12 V z wtyczką gniazda
zapalniczki
• Wodoodporny zewnętrzny odbiornik GPS
• Ochronna gumowa obudowa
• Uchwyt z przyssawką do szyby
• Kabel USB
• Zewnętrzna antena DVBT TV *
*tylko model G6 Connect Farmnavigator
Port seryjny
Złącze USB master/slave
Wyjście audio
Zasilanie 220 volt
Czuwanie
Mikrofon
Głośnik
1.2 Opis urządzenia

AvMap - 5
Farmnavigator
Gniazdo kart SD
Przyłącze do uchwytu
magnetycznego
WŁĄCZ-WYŁĄCZ
Reset
Czujnik
zmierzchowy
Złącze
zasilania 12 V
Magnetyczna stacja
bazowa
Złącze
zewnętrznego
odbiornika GPS
1.3 Montaż
1. Magnetyczną stację bazową zamontować na uchwycię
z przyssawką.
2. Zamontować uchwyt na szybie pojazdu. Szyba winna
być odtłuszczona i wolna od kurzu. Aby zwiększyć
pewność mocowania zaleca się zwilżyć przyssawkę.
3. Podłączyć kabel zasilania 12 V do gniazda w uchwycie
magnetycznym a w maszynie roboczej do gniazda
zapalniczki.
4. Podłączyć zewnętrzny odbiornik GPS z urządzeniem
poprzez 9-cio pinowe złącze wychodzące z uchwytu
magnetycznego. Odbiornik zewnętrzny GPS z podstawą
magnetyczną zamontować na środku maski nad przednią
osią ciągnika. Przy maskach wykonanych z materiału
niemagnetycznego (plastik, aluminium) można posłużyć

6 - AvMap
Farmnavigator
się podkładką metalową przyklejoną do maski za pomocą
kleju montażowego
5. Umieścić Farmnavigatora w uchwycie magnetycznym
stacji bazowej. Można zaczynać pracę.
UWAGA: Nigdy nie usuwać karty pamięci z urządzenia
podczas pracy oprogramowania. Nawet w trybie czuwania
oprogramowanie pracuje w tle. Kartę można wyciągać
w menu startowym(menu wyboru między nawigacją
a odtwarzaczem multimedialnym) lub gdy urządzenie
jest wyłączone. Niestosowanie się do tych zaleceń grozi
utratą danych.

AvMap - 7
Aby przejść do menu głównego Farmnavigatora należy
w menu głównym nawigacji drogowej nacisnąć ikonę
nawigacji polowej w górnym prawym rogu.
Menu zawiera następujące ikony:
• Pola
• Belka polowa
• Ustawienia
• Import
• Kamera
• Głośność i jasność
• Bluetooth
W górnej części wyświetlacza znajdują się ikony wyboru
między widokiem roboczym nawigacji polowej oraz
powrotu do menu głównego nawigacji drogowej. .
Z widoku roboczego powracamy do menu głównego
Farmnavigatora klikając na ikonę ciągnika w lewym
dolnym rogu wyświetlacza.
2. Farmnavigator – menu główne

8 - AvMap
Farmnavigator
2.1 Pola
Menu zawiera bazę danych pól, gdzie znajduje sie ich
szczegółowy opis. Tu można utworzyć nowe pole lub
kontynuować pracę na już rozpoczętym polu.
Aby powrócić do menu głównego, należy kliknąć ikonę
wstecz w lewym górnym rogu wyświetlacza.
2.2 Belka robocza
Ta ikona prowadzi nas do ustawień wirtualnego
sterowania sekcjami roboczymi opryskiwacza. Mamy tu
możliwość dokonywania ustawień charakterystycznych
dla posiadanej belki( szerokość robocza, ilość dysz oraz
sekcji, ilość dysz w danej sekcji).Tą funkcję urządzenia
można dostosować do każdej innej maszyny wyposażonej
w sekcje(rozsiewacz, wóz asenizacyjny z wężami
rozlewającymi, siewniki). Ikona belki roboczej znajduje
się również w menu ustawienia.

AvMap - 9
Farmnavigator
2.3 Ustawienia
Klikając na tą ikonę uzyskujemy możliwość ustawienia
podstawowych parametrów pracy urządzenia, ,dopasowując
je do agregatowanej maszyny, takich jak:
• Szerokość robocza
• Belka polowa
• Linie nawigacyjne
• Przesunięcie
• Jednostka
• Prędkość minimalna
• Ustawienia główne
Aby powrócić do menu głównego, należy kliknąć ikonę
Wstecz w lewym górnym rogu wyświetlacza.
2.3.1 Szerokość robocza
Służy do ustalania szerokości roboczej pojazdu lub
maszyny. Odległość między liniami nawigacyjnymi
obliczana jest za pomocą tej wartości.

10 - AvMap
Farmnavigator
UWAGA: Aby menu było aktywne, należy wyłączyć
wirtualne sterowanie sekcjami roboczymi opryskiwacza
w menu Belka polowa.
2.3.2 Belka polowa
Ikona belki roboczej znajduje się również w menu głównym
Farmnavigatora. (rozdz. 2.2).w rozdziale 3.7 znajduje
się szczegółowy opis ustawiania parametrów wirtualnego
sterowania sekcjami roboczymi opryskiwacza.
2.3.3 Linie nawigacyjne
Menu służy do ustawiania trybu nawigacji (rozdz. 3.5).
2.3.4 Przesunięcie
Określa położenie odbiornika GPS względem belki roboczej
opryskiwacza.
Wartości dodatnie – belka znajduje się przed anteną GPS
Wartości ujemne – belka znajduje się za anteną GPS

AvMap - 11
Farmnavigator
2.3.5 Jednostka
Pozwala na wybór miedzy dwoma jednostkami miar:
metryczne: (ha, km/h, m, cm)
Imperialne: (akr, mph, stopy, cale).
2.3.6 Min. prędkość
Określenie prędkości minimalnej rozpoczęcia zapisu
pozycji GPS. Pozycje GPS „skaczą“ podczas postoju do
10m, dlatego też zaleca się ustawienia w przedziale
0,5-2 km/h. Ustawienie fabryczne wynosi 1 km/h.
2.3.7 Ustawienia główne
Pozwala nam na zmianę ustawień osobistych jak i
preferencji urządzenia. Szczegółowe informacje
dotyczące ustawień głównych znajdują się w instrukcji
obsługi nawigacji drogowej.

12 - AvMap
Farmnavigator
2.4 Kamera
Widok z kamery zewnętrznej. Po lewej stronie znajdują się
dwa przyciski:
Nawigacja polowa: widok roboczy nawigacji polowej
Farmnavigator: powrót do menu głównego nawigacji polowej
2.5 Głośność i jasność
Menu pozwala na dostosowanie jasności wyświetlacza jak i
głośności do indywidualnych preferencji operatora. Zmiany
zostają zachowane po naciśnięciu przycisku Akceptuj.
2.6 Bluetooth
Farmnavigator może służyć również jako zestaw
głośnomówiący dla telefonów obsługujących Bluetooth.
Szczegółowe informacje dotyczące synchronizacji
Farmnavigatora z Twoim telefonem znajdują się w
instrukcji obsługi nawigacji drogowej.

AvMap - 13
3.1 Utworzenie pola
Wszelkich ustawień parametrów pracy - belka robocza,
szerokość maszyny, przesunięcie, tryb nawigacji (rozdz.
2.3) dokonywać przed utworzeniem nowego pola. Ze
względów bezpieczeństwa, dokonywanie zmian w już
otwartym polu nie jest możliwe.
Otworzyć menu główne Farmnavigatora i nacisnąć ikonę
Pola. Przy pierwszym otwarciu lista pól jest pusta. Aby
utworzyć nowe pole nacisnąć ikonę Nowe pole. Ukazuje
się widok roboczy.
3.2 Praca na polu
Aby rozpocząć pracę, należy nacisnąć ikonę
START. Urządzenie zaczyna zapis śladu pracy, czyli
przepracowanej powierzchni pola. Odnotowywane są
również dane jak maksymalna prędkość, czas pracy itd.
Istnieje możliwość pomiaru powierzchni , granic pola
jak i ustawiania przeszkód. Wszystko zostaje zapisane w
3. Ustawianie parametrów roboczych i praca na polu

14 - AvMap
Farmnavigator
bazie danych pola.
Aby zakończyć zapis należy nacisnąć ikonę STOP na
wyświetlaczu. W celu kontynuowania pracy należy
ponownie nacisnąć ikonę START. Funkcja przydatna
podczas pracy zakończonej na środku pola, np. podczas
konieczności przerwania pracy w celu ponownego
napełnienia opryskiwacza.
3.3 Pomiar powierzchni pola
Aby dokonać pomiaru powierzchni, należy na początku
pracy objechać pole dookoła. Szerokość roboczą dobrać
tak, aby wynosiła ona połowę odległości do granicy, t. j.
jeżeli odległość do granicy wynosi 3m wówczas należy
ustawić szerokość roboczą na 6m. Przejechać kilka
metrów, następnie nacisnąć ikonę Pomiar powierzchni
na wyświetlaczu (symbol linijki). Od tego miejsca zaczyna
się pomiar( wyświetlona zostaje czerwona strzałka na
wyświetlaczu). Następnie należy objechać pole dookoła

AvMap - 15
Farmnavigator
aż do punktu rozpoczęcia pracy. Nacisnąć ponownie
ikonę pomiaru pola. Powierzchnia zostaje obliczona i
zapisana w bazie danych pola.
3.4 Ustawianie przeszkód/miejsc pobierania
próbek ziemi
Podczas pracy istnieje możliwość zapisu pozycji
przeszkód (drzewa, studzienki) lub miejsc pobierania
próbek ziemi.Aby zapisać pozycję należy, znajdując
się jak najbliżej interesującego nas przedmiotu,
nacisnąć ikonę Przeszkoda na ekranie dotykowym
Farmnavigatora(symbol pachołka drogowego). Przeszkody
w kolejności numerycznej zostają zapisane w bazie
danych pola.
3.5 Wybór trybu prowadzenia
Pomiar powierzchni pola jak i zakładanie referencyjnych
linii nawigacyjnych można dokonywać podczas tego

16 - AvMap
Farmnavigator
samego przejazdu.
Aby ustalić tryb prowadzenia należy:
1. Otworzyć menu główne nawigacji polowej
2. Nacisnąć ikonę Ustawienia
3. Następnie nacisnąć Linie nawigacyjne.
4. Dokonać wyboru między trybami nawigacji:
• Równolegle
• Konturowo
• Scieżka
• Po okręgu
5. Zatwierdzić wybór naciskając Akceptuj
6. Nacisnąć ikonę Nawigacja polowa w górnym prawym
rogu wyświetlacza, aby przejść do widoku roboczego.
3.5.1 Równolegle
Na polach o „prostych“ granicach. Podczas jazdy pierwszą
ścieżką, stawiamy na jej początku punkt A naciskając
ikonę na wyświetlaczu. Punkt A zostaje zaznaczony

AvMap - 17
Farmnavigator
ikoną na mapie pola. Pojawia się ikona punktu B. Przed
uwrociem nacisnąć ikonę punktu B na wyświetlaczu.
Punkt zostaje zapisany na mapie pola. Farmnavigator
łączy punkty A i B linią referencyjną i generuje do
niej linie równoległe w odstępach równych szerokości
roboczej maszyny. Istnieje możliwość usunięcia linii
nawigacyjnych, np. w celu wyznaczenia nowych w
innym kierunku, lecz na tym samym polu. Linie usuwamy
naciskając ikonę Usuń linie.
3.5.2 Konturowo
Stosowane na polach o nieregularnych kształtach. Jak
podczas jazdy równoległej, na początku śladu postawić
punkt A linii nawigacyjnej, naciskając odpowiednią
ikonę. Ślad jest zapisywany w sposób ciągły,
odwzorowując nierówności granicy pola. Na krótko przed
uwrociem postawić punkt B. Farmnavigator oblicza do
zapisanej linii referencyjnej nieskończenie wiele linii

18 - AvMap
Farmnavigator
nawigacyjnych w odległości równej szerokości roboczej
maszyny lub belki roboczej opryskiwacza.
3.5.3 Ścieżka
Tryb służący do poruszania się w istniejących już
ścieżkach technologicznych. Pozwala na zapis śladu pracy
oraz dokładnie wykonanie oprysku dzięki wirtualnemu
sterowaniu belki roboczej.
3.5.4 Po okręgu
Ustala nam linie nawigacyjne po okręgu. Zaczynając
jazdę dookoła granicy pola, naciśnij ikonę punktu A.
Po zakończeniu pierwszego przejazdu naciśnij ikonę B:
oprogramowanie obliczy oddające granicę pola okręgi
w kierunku środka pola w odstępach równych szerokości
roboczej maszyny.
AvMap - 19
Farmnavigator
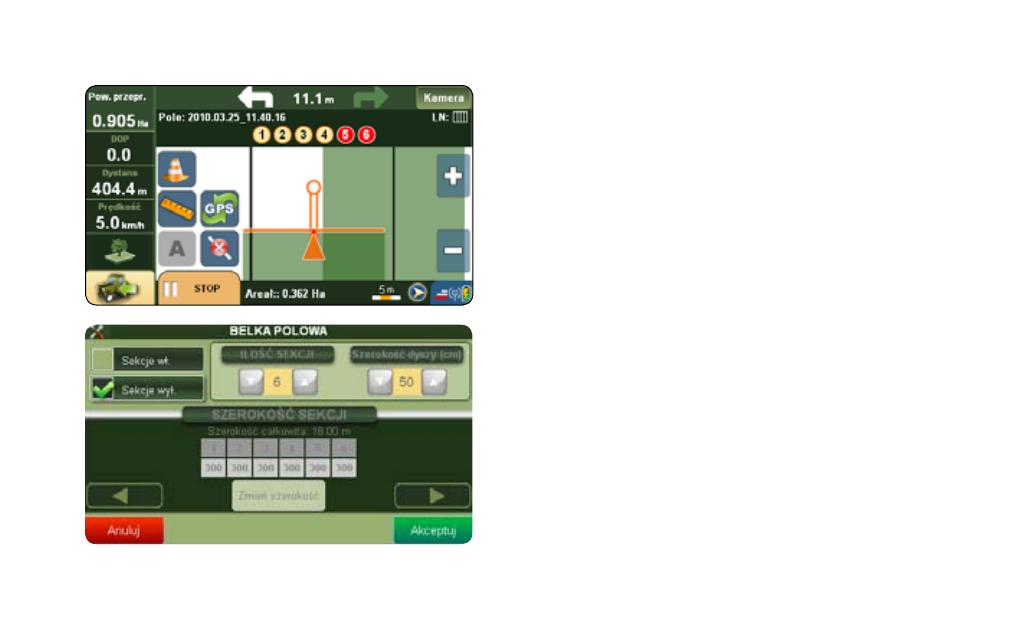
3.6 Panel sterujący
Po utworzeniu linii nawigacyjnych uaktywnia się panel
nawigacyjny nad kartą pola. Wskazuje on, poprzez
strzałki, o ile i w którą stronę należy korygować tor jazdy
pojazdu, aby poruszać się dokładnie wzdłuż wyznaczonych
linii nawigacyjnych. Między strzałkami pokazywana jest
wartość odchylenia (cm) od toru idealnego, odpowiednio
w prawo lub lewo. Na uwrociu wartość wskazuje nam
odległość do następnej ścieżki roboczej. Po lewej stronie
znajdują się cztery pola: przepracowana powierzchnia,
dystans(odległość przejechana po polu), prędkość
oraz wartość DOP. Informacje dotyczące wartości DOP
znajdują się w załączniku A.
Po zakończeniu pracy na polu należy wcisnąć STOP
na wyświetlaczu. Przepracowana powierzchnia
(podświetlona na zielono) zostaje zapisana w bazie
danych pola. Pole można w każdej chwili otworzyć i
kontynuować pracę, naciskając START.

20 - AvMap
Farmnavigator
3.7 Wirtualne sterowanie sekcjami
roboczymi opryskiwacza
Farmnavigator posiada unikalną funkcję wirtualnego
sterowania sekcjami roboczymi opryskiwacza. Funkcja ta
wspomaga sterować opryskiwacz lub też inną maszynę, która
ma podział na sekcje( dwutalerzowe rozsiewacze nawozów
z oddzielnym zamykaniem otworów dozujących, wozach
asenizacyjnych z wężami rozlewowymi, siewnikami itp.).
Podczas pracy z pestycydami bardzo ważna jest ich dokładna
aplikacja. Wirtualne sterowanie sekcjami roboczymi
opryskiwacza w znacznym stopniu ułatwia pracę podczas
oprysków na polach o nieregularnym kształcie jak i pracach
nocą.
W celu uaktywnienia tej funkcji należy w menu belki roboczej
włączyć sterowanie sekcjami.
UWAGA: Podczas pracy z włączonym wirtualnym sterowaniem
sekcjami roboczymi opryskiwacza, szerokość robocza jest
obliczana z parametrów belki opryskiwacza. Menu Szerokość
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
Strona jest ładowana ...
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32































